Šiuolaikiniame pasaulyje robotas vaidins svarbų vaidmenį . Pagrindinis roboto tikslas yra sumažinti žmogaus galią. Robotai naudojami elektronikoje daugelyje programų. Šiame straipsnyje aptarėme, kaip sukurti robotą naudojant „Arduino“ modulį ir 8051 mikrovaldiklį. Norėdami sukurti robotą su „Arduino“, mes paaiškiname apie „arduino“ robotą su kliūčių vengimu. Reikalingi komponentai yra roboto korpusas, nuolatinės srovės variklis, ultragarso jutiklis, „Arduino“ modulis, variklio tvarkyklės IC ir „Arduino“ modulis
Kaip sukurti robotą?
The reikalingi komponentai sukurti robotą apima šiuos dalykus
Roboto korpusas
Pagrindinis roboto korpusas kliūčių vengimo robotas yra parodyta šiame paveikslėlyje. Roboto korpusas yra plastikinis korpusas, iš kurio abiejų pusių yra ratai. Roboto korpuso priekyje yra išdėstytas ultragarso jutiklis. Naudojant ultragarso jutiklį, kliūtis gali aptikti. Kai robotas juda, jei ultragarso jutiklis nustato kokią nors kliūtį, robotas pasislinks į šoną ir jis toliau judės.

Roboto korpusas
Nuolatinės srovės variklis
The Nuolatinės srovės variklis yra elektros variklis ir jis dirba iš nuolatinės srovės elektros. Bet kurio elektrinio variklio veikimas pagrįstas elektromagnetizmu. Magnetinį lauką sukuria srovės laidininkas, kai jis dedamas į išorinį magnetinį lauką, jis patirs jėgą, proporcingą laidininko srovei. Paprastai mes žinome, kad magnetai yra priešingi poliškumo traukai iš šiaurės į pietus ir, jei poliarumai yra tokie patys kaip šiaurė į šiaurę ir pietus į pietus, tada magnetai atstums.

Nuolatinės srovės variklis
Vidinė nuolatinės srovės variklio konfigūracija skirta pritvirtinti magnetinę sąveiką tarp srovės laidininko ir išorinio magnetinio lauko, kad būtų sukurtas judėjimas. Šiuo atveju mes naudojame du nuolatinės srovės variklius, kiekviename variklyje yra 6v, o dviejuose nuolatinės srovės varikliuose yra 12v. Du nuolatinės srovės varikliai dedami į roboto korpusą, kurį galime stebėti šiame paveikslėlyje. Roboto korpusas judinamas nuolatinės srovės variklių pagalba

Roboto korpusas su nuolatinės srovės varikliu
„Arduino“ modulis
Šiame paveikslėlyje parodytas „arduino“ modulio vaizdas. The arduino modulis vaidina svarbų vaidmenį kuriant kliūčių išvengimo robotą, naudojant „arduino“ rinkinį. „Arduino“ imtuvo kaištis yra prijungtas prie antrojo ultragarso jutiklio kaiščio, o 1, 2 ir 3 „Arduino“ modulio kaištis yra prijungtas prie nuolatinės srovės variklio tvarkyklės. Bendrieji komponentai kondensatorius ir diodas taip pat yra prijungti prie „arduino“ modulio akumuliatoriaus maitinimo šaltinio pagalba.

„Arduino“ modulis
Variklio vairuotojo IC
Norint paleisti nuolatinės srovės variklį variklio vairuotojo IC naudojamas. Variklio tvarkyklės kaiščiai 3,6 ir 11, 14 yra prijungti prie nuolatinės srovės variklio. 1 ir 2 įvesties kaiščiai yra prijungti prie „arduino“ modulio, o įjungimo kaištis - prie „arduino“ siųstuvo kaiščio. Variklio vairuotojo kaiščiai 4, 5, 12, 13 yra prijungti prie žemės.

Variklio vairuotojo IC
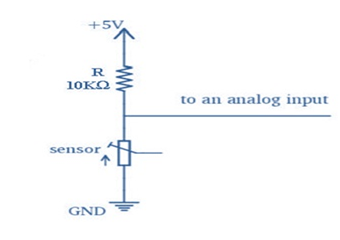
Ultragarsinis jutiklis
Šioje koncepcijoje ultragarso jutiklis naudojamas aptikti priekyje esančią kliūtį ir komandą nusiųs į „arduino“ lentą. Priklausomai nuo įvesties signalo, mikrovaldiklis nukreipia robotą judėti pakaitomis.

Ultragarsinis jutiklis
Arduino roboto kliūčių išvengimo programos
- Arduino robotas gali judėti bet kokiu paviršiumi
- Jis gali judėti metaliniu paviršiumi kaip šaldytuvo korpusas.
Žemiau esančiame paveikslėlyje parodytas „arduino“ robotas, skirtas išvengti kliūčių

„Arduino“ robotas, skirtas išvengti kliūčių
Sukurti robotą su 8051 mikrovaldiklis mes aiškinamės apie metalo detektoriaus robotą transporto priemonę. Komponentai, reikalingi roboto sukūrimui su mikrovaldikliu 8051, yra
- 8051 mikrovaldiklis
- Nuolatinės srovės varikliai
- Variklių vairuotojai
- Metalo detektorius
- Dekoderis
- Koduotojas
- Paspauskite mygtukus
- Krištolas
- RF siųstuvas ir imtuvas
Metalo detektorius
The metalo detektorius yra ritė, kurioje yra viena ar daugiau metalinių ritinių, naudojamų metalams aptikti ant žemės. Metalo detektorius veikia elektromagnetinės indukcijos principu. Metalo detektorius yra prijungtas prie roboto korpuso per PCB, kurį galime stebėti paskutiniame paveikslėlyje. Šiame paveikslėlyje parodytas bendras metalo detektorius, naudojamas elektroniniuose projektuose.

Metalo detektorius
Mygtukai
Mygtukai yra mygtukai, pagaminti iš kietų metalų, tokių kaip plastikas ir metalas. Paprastai mygtukai naudojami norint atkurti mikrovaldiklio programą. Šiame paveikslėlyje rodomas mygtuko vaizdas.

Paspauskite mygtuką
8051 mikrovaldiklis
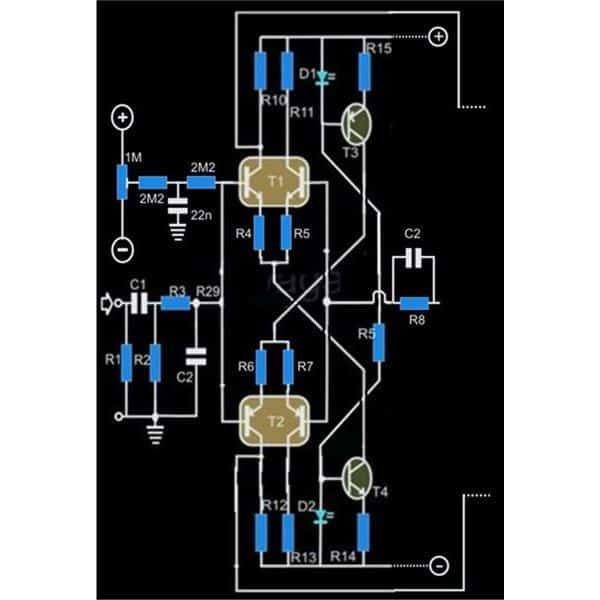
The 8051 mikrovaldiklį sudaro 40 kaiščių . 4 ir 5 mikrovaldiklio kaiščiai yra prijungti prie kristalinio osciliatoriaus. „Vcc“ kaištis suteikiamas 5 V maitinimo šaltiniui, o įžeminimo kaištis yra prijungtas prie žemės. Mikrovaldiklio kaiščiai 15, 16, 18, 19 yra prijungti prie HT12E kodavimo įrenginio IC. Mikrovaldiklio kaiščiai 2, 7, 8, 9 yra prijungti prie mygtukų.
Šis vaizdas sujungus visus komponentus, tokius kaip rezistorius, kondensatorius, kristalinis osciliatorius, 8051 serijos mikrovaldiklis, enkoderiai ir kt., Yra įjungtas spausdintinės plokštės .

PCB jungtys
Žemiau pateiktame paveikslėlyje parodytas metalo detektoriaus robotas su 8051 serijos mikrovaldikliu.

Metalo detektoriaus robotas su 8051 serijos mikrovaldikliu
Šiame straipsnyje aptarėme apie Kaip sukurti robotą su „arduino“ ir „8051“ mikrovaldikliu . Tikiuosi, kad perskaitę šį straipsnį įgijote pagrindinių žinių apie roboto sukūrimą. Jei turite klausimų apie šį straipsnį arba apie elektroniką ir komunikacijos projektai , nedvejodami pakomentuokite žemiau esančiame skyriuje. Štai jums klausimas, Kas yra 8051 serijos mikrovaldiklis?
.