Kodėl reikalinga lanksti kintamosios srovės perdavimo sistema?
Įprastoje kintamosios srovės perdavimo sistemoje galimybę perduoti kintamą energiją riboja keli veiksniai, tokie kaip šiluminės ribos, laikino stabilumo riba, įtampos riba, trumpojo jungimo srovės riba ir kt. Šios ribos apibrėžia didžiausią elektros galią, kurią galima efektyviai perduoti per perdavimo linijos nepažeidžiant elektros įrangos ir perdavimo linijų. Tai paprastai pasiekiama pakeitus energijos sistemos išdėstymą. Tačiau tai neįmanoma ir dar vienas būdas pasiekti maksimalią energijos perdavimo galimybę be jokių pakeitimų energijos sistemos išdėstyme. Taip pat įvedus kintamosios varžos įtaisus, tokius kaip kondensatoriai ir induktoriai, visa šaltinio energija ar galia neperduodama į apkrovą, tačiau dalis šiuose įtaisuose yra saugoma kaip reaktyvioji galia ir grąžinama į šaltinį. Taigi faktinis į apkrovą arba aktyviąją galią perduodamos galios kiekis visada yra mažesnis už tariamąją galią arba naudingąją galią. Idealiam perdavimui aktyvioji galia turėtų būti lygi tariamai galiai. Kitaip tariant, galios koeficientas (aktyviosios galios ir regimosios galios santykis) turėtų būti vienybė. Čia atsiranda lanksčios kintamosios srovės perdavimo sistemos vaidmuo.
Prieš eidami į informaciją apie FAKTUS, trumpai papasakokime apie galios koeficientą.
Kas yra galios koeficientas?
Galios koeficientas apibrėžiamas kaip aktyviosios galios ir tariamos galios grandinėje santykis.
Kad ir koks būtų galios koeficientas, kita vertus, generuojančioji galia turėtų padėti mašinoms tiekti tam tikrą įtampą ir srovę. Generatoriai turi sugebėti atlaikyti įvertintą pagamintos energijos įtampą ir srovę. Galios koeficiento (PF) vertė yra nuo 0,0 iki 1,0.
Jei galios koeficientas yra lygus nuliui, srovės srautas yra visiškai reaktyvus ir apkrovoje sukaupta galia grįžta į kiekvieną ciklą. Kai galios koeficientas yra 1, apkrova suryja visą šaltinio tiekiamą srovę. Paprastai galios koeficientas išreiškiamas kaip įtampos viršijimas arba atsilikimas.
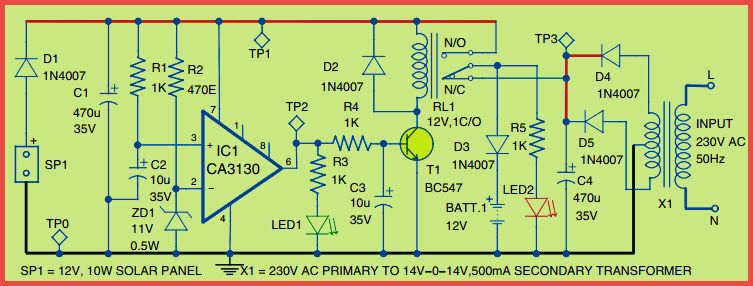
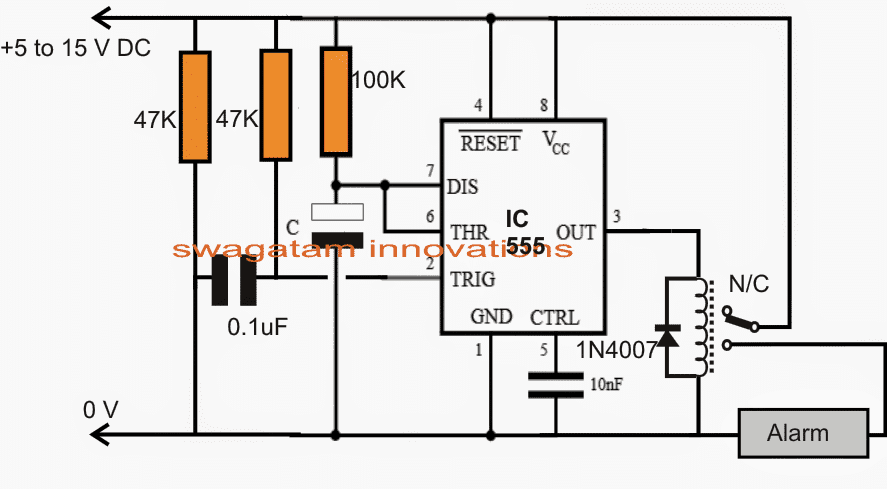
Vienybės galios faktoriaus bandymo grandinė
Grandinė su maitinimo šaltiniu yra 230 V, o droselis yra sujungtas nuosekliai. Norint pagerinti galios koeficientą, kondensatoriai turi būti lygiagrečiai jungiami per SCR jungiklius. Kol apėjimo jungiklis yra išjungtas, droselis veikia kaip induktorius ir ta pati srovė tekės tiek 10R / 10W rezistoriuose. KT naudojama kaip pirminė pusė, sujungta su bendru rezistorių tašku. Kitas KT taškas eina į vieną iš įprastų DPDT S1 jungiklio taškų. Kol DPDT jungiklis perkeliamas į kairę, jis pajunta įtampos kritimą, proporcingą srovei, kad padidėtų įtampa. Įtampos kritimas yra proporcingas atsiliekančiai srovei. Taigi pirminė įtampa iš KT suteikia atsilikusią srovę.
Jei naudojama mikrovaldikliu pagrįsta valdymo grandinė, tada gaunama nulinė srovės nuoroda ir palyginama su nuline įtampa, kad galios koeficientas būtų apskaičiuojamas pagal jų laiko skirtumą. Taigi priklausomai nuo reikalingo laiko skirtumo Nr. iš SCR jungiklių yra įjungiami, taip perjungiant papildomus kondensatorius, kol galios koeficientas bus beveik vieningas.
Taigi, atsižvelgiant į jungiklio padėtį, galima nujausti atsilikusią arba kompensuojamą srovę, o ekranas atitinkamai pateikia laiko tarpą tarp įtampų, srovę su galios koeficiento rodymu.

Kas yra lanksti kintamosios srovės perdavimo sistema (FAKTAI)?
Į Lanksti kintamosios srovės perdavimo sistema reiškia sistemą, susidedančią iš galios elektroninių prietaisų kartu su energijos sistemos įtaisais, siekiant pagerinti perdavimo sistemos valdomumą ir stabilumą bei padidinti energijos perdavimo galimybes. Išradus tiristoriaus jungiklį, atvėrė duris kurti galios elektronikos prietaisus, vadinamus lanksčių kintamosios srovės perdavimo sistemų (FAKTŲ) valdikliais. FACT sistema naudojama siekiant užtikrinti tinklo aukštos įtampos valdomumą integruojant galios elektroninius įtaisus, kad į tinklą įvestų indukcinę ar talpinę galią.
4 FAKTŲ valdiklių tipai
- Serijos valdikliai: Serijos valdiklius sudaro kondensatoriai arba reaktoriai, kurie įtampą įveda nuosekliai su linija. Jie yra kintamosios varžos įtaisai. Jų pagrindinė užduotis yra sumažinti perdavimo linijos induktyvumą. Jie tiekia arba sunaudoja kintamą reaktyviąją galią. Serijinių valdiklių pavyzdžiai yra SSSC, TCSC, TSSC ir kt.
- Šunto valdikliai: Šuntiniai valdikliai susideda iš kintamos impedanso įtaisų, tokių kaip kondensatoriai ar reaktoriai, kurie nuosekliai tiekia srovę su linija. Jų pagrindinė užduotis yra sumažinti perdavimo linijos talpą. Įpurškiama srovė yra fazėje su linijos įtampa. Šunto valdiklių pavyzdžiai yra STATCOM, TSR, TSC, SVC.
- „Shunt“ serijos valdikliai: Šie valdikliai įveda srovę nuosekliai, naudodami nuoseklius valdiklius, ir įtampą šuntuose, naudodami šunto valdiklius. Pavyzdys yra UPFC.
- Serijos serijos valdikliai : Šie valdikliai susideda iš nuoseklių valdiklių derinio, kiekvienam valdikliui suteikiant nuoseklųjį kompensavimą ir realios galios perdavimo linijoje. Pavyzdys yra IPFC.
2 serijos valdiklių tipai
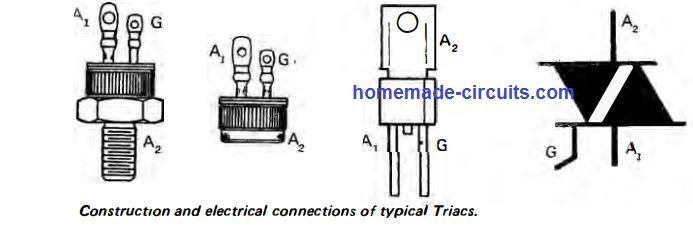
- Tiristoriaus valdomas serijinis kondensatorius (TCSC): Tiristoriaus valdomas serijinis kondensatorius (TCSC) naudoja silicio valdomus lygintuvus, kad valdytų kondensatorių banką, nuosekliai sujungtą su linija. Tai leidžia naudingumui perduoti daugiau galios nurodytoje linijoje. Paprastai jis susideda iš tiristorių, serijiniu būdu su induktoriumi ir sujungtų per kondensatorių. Jis gali veikti blokavimo režimu, kai tiristorius nesuveikia, o srovė praeina tik per kondensatorių. Jis gali veikti apėjimo režimu, kai srovė aplenkiama tiristoriui, o visa sistema elgiasi kaip šunto impedanso tinklas.
- Statinės serijos sinchroniniai kompensatoriai : SSSC yra tiesiog serijinė STATCOM versija. Jie nėra naudojami komercinėse programose kaip nepriklausomi valdikliai. Jie susideda iš sinchroninio įtampos šaltinio nuosekliai su linija taip, kad įvestų kompensacinę įtampą nuosekliai su linija. Jie gali padidinti arba sumažinti įtampos kritimą visoje linijoje.
2 lygiagrečiai valdikliai
- Statiniai kintamieji kompensatoriai : Statinis kintamasis kompensatorius yra primityviausia ir pirmoji FACTS valdiklio karta. Šis kompensatorius susideda iš greito tiristoriaus jungiklio, valdančio reaktorių ir (arba) šunto talpinį banką, kad būtų užtikrinta dinaminė šunto kompensacija. Paprastai jie susideda iš šunto sujungtų kintamosios varžos įtaisų, kurių išėjimą galima reguliuoti naudojant galios elektroninius jungiklius, kad linijoje būtų įvestas talpinis arba indukcinis reaktyvumas. Jis gali būti dedamas į linijos vidurį, siekiant padidinti maksimalų energijos perdavimo pajėgumą, taip pat gali būti dedamas į linijos galą, kad būtų kompensuoti pokyčiai dėl apkrovos.
3 SVC tipai yra
- TSR (tiristoriaus komutuojamas reaktorius) : Jį sudaro šuntinis prijungtas induktorius, kurio varža laipsniškai valdoma naudojant tiristoriaus jungiklį. Tiristorius šaudomas tik 90 ir 180 laipsnių kampu.
- TSC (tiristoriaus perjungiamas kondensatorius) : Jį sudaro šuntinis prijungtas kondensatorius, kurio varža valdoma palaipsniui naudojant tiristorių. Kontrolės būdas naudojant SCR yra toks pat kaip ir TSR.
- TCR (tiristoriumi valdomas reaktorius) : Jį sudaro šuntinis prijungtas induktorius, kurio varža valdoma naudojant SCR šaudymo kampo uždelsimo metodą, kai tiristorius yra valdomas, dėl kurio kinta srovė per induktorių.
- STATCOM (statinis sinchroninis kompensatorius) : Jį sudaro įtampos šaltinis, kuris gali būti nuolatinės srovės energijos šaltinis, arba kondensatorius, arba induktorius, kurio išėjimą galima valdyti naudojant tiristorių. Jis naudojamas reaktyvinei energijai absorbuoti arba generuoti.
Serijos šunto valdiklis - vieningas maitinimo srauto valdiklis:
Jie yra STATCOM ir SSSC deriniai, kurie abu yra derinami naudojant bendrą nuolatinės srovės šaltinį ir suteikia aktyviosios ir reaktyviosios serijos linijos kompensaciją. Jis valdo visus kintamosios srovės perdavimo parametrus.
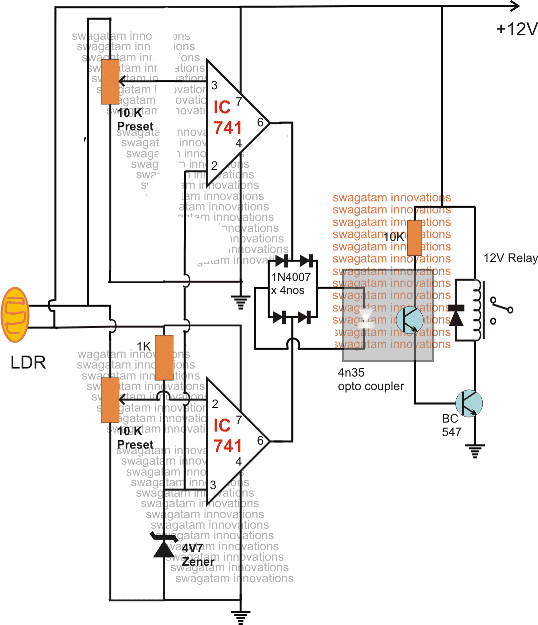
Pastoviosios įtampos valdymas naudojant SVC lanksčioms kintamosios srovės perdavimo sistemoms

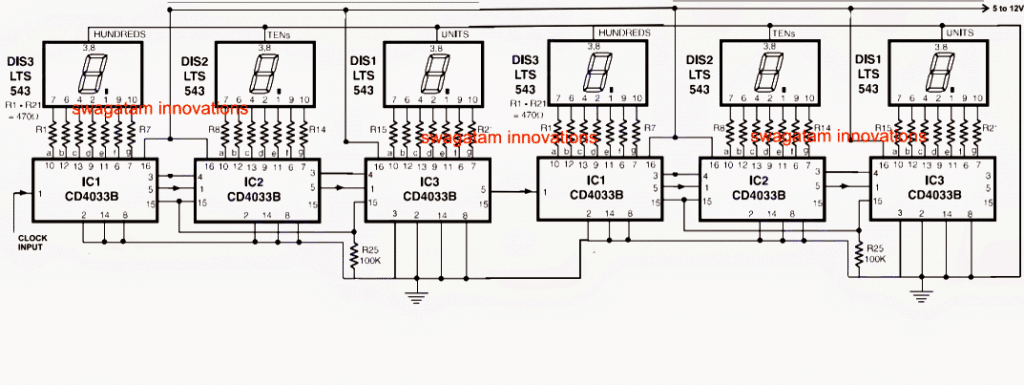
Norint generuoti nulio kirtimo įtampos impulsus, mums reikia skaitmeninių įtampos ir srovės signalų. Įtampos signalas iš tinklo paimamas ir tilto lygintuvu paverčiamas pulsuojančia nuolatine nuolatine srove ir atiduodamas skaitmeniniam įtampos signalui generuojančiam lyginamajam įrenginiui. Panašiai srovės signalas paverčiamas įtampos signalu imant apkrovos srovės įtampos kritimą per rezistorių. Šis kintamosios srovės signalas vėl bus paverstas skaitmeniniu signalu kaip įtampos signalu. Tada šie skaitmenizuoti įtampos ir srovės signalai siunčiami į mikrovaldiklį. Mikrovaldiklis apskaičiuos laiko skirtumą tarp įtampos ir srovės nulio kryžminimo taškų, kurių santykis yra tiesiogiai proporcingas galios koeficientui ir nustato diapazoną, kuriame galia yra. Tuo pačiu būdu, naudojant tiristoriaus komutuojamą reaktorių (TSR), taip pat gali būti generuojami nulinės kryžminės įtampos impulsai, siekiant pagerinti įtampos stabilumą.
SVC lanksti kintamosios srovės perdavimo sistema

SVC lanksti kintamosios srovės perdavimo sistema
Pirmiau pateiktą grandinę galima naudoti siekiant pagerinti perdavimo linijų galios koeficientą naudojant SVC. Jis naudoja tiristorių perjungtus kondensatorius (TSC), pagrįstus šunto kompensavimu, tinkamai valdomu iš užprogramuoto mikrovaldiklio. Tai naudinga norint padidinti galios koeficientą. Jei indukcinė apkrova yra prijungta, galios koeficientas atsilieka dėl apkrovos srovės atsilikimo. Norėdami tai kompensuoti, yra prijungtas šuntinis kondensatorius, kuris pritraukia srovę, vedančią šaltinio įtampą. Tada bus pagerintas galios koeficientas. Laiko tarpą nuo nulinės įtampos ir nulinės srovės impulsų tinkamai sukuria lyginamojo režimo operaciniai stiprintuvai, kurie tiekiami į 8051 mikrovaldiklių seriją.
Naudojant FACTS valdiklį, galima valdyti reaktyviąją galią. Sub sinchroninis rezonansas (SSR) yra reiškinys, kurį tam tikromis nepalankiomis sąlygomis galima susieti su nuosekliu kompensavimu. SSR pašalinimas gali būti atliekamas naudojant FACTS valdiklius. FAKTŲ prietaisų nauda yra tokia, kaip finansinė nauda, padidėjusi tiekimo kokybė, padidėjęs stabilumas ir kt.
Lanksčios kintamosios srovės perdavimo sistemos problema ir būdas ją išspręsti
Dėl lankstus kintamosios srovės energijos perdavimas , kietojo kūno įtaisai dažnai įtraukiami į grandines, kurios naudojamos galios koeficientui gerinti ir kintamosios srovės perdavimo sistemos riboms padidinti. Tačiau pagrindinis trūkumas yra tas, kad šie įtaisai yra netiesiniai ir sukelia sistemos išėjimo signalo harmonikas.
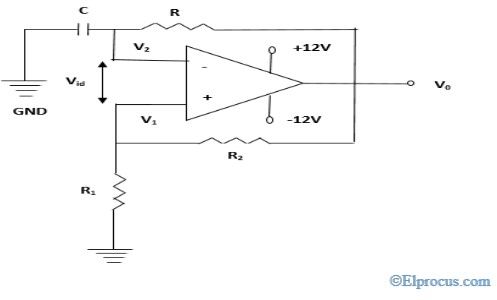
Norint pašalinti harmonikas, atsirandančias dėl galios elektroninių prietaisų įtraukimo į kintamosios srovės perdavimo sistemą, reikia naudoti aktyviuosius filtrus, kurie gali būti srovės šaltinio filtrai arba įtampos šaltinio galios filtrai. Pirmasis apima kintamosios srovės sinusoidės formavimą. Metodas yra tiesiogiai valdyti srovę arba valdyti filtro kondensatoriaus išėjimo įtampą. Tai įtampos reguliavimo arba netiesioginės srovės valdymo metodas. Aktyviosios galios filtrai įpurškia srovę, kurios dydis yra lygus, bet fazėje priešingas harmoninei srovei, kurią ištraukia apkrova, kad šios dvi srovės panaikintų viena kitą, o šaltinio srovė būtų visiškai sinusinė. Aktyviosios galios filtrai turi galios elektroninius įtaisus, kurie gamina harmoninės srovės komponentus, kurie panaikina išėjimo signalo harmoninės srovės komponentus dėl netiesinių apkrovų. Paprastai aktyviosios galios filtrai susideda iš izoliuoto vartų bipolinio tranzistoriaus ir diodo, maitinto nuolatinės srovės magistralės kondensatoriumi, derinio. Aktyvus filtras valdomas naudojant netiesioginės srovės valdymo metodą. IGBT arba izoliuotas vartų bipolinis tranzistorius yra įtampos valdomas bipolinis aktyvus įtaisas, apimantis BJT ir MOSFET savybes. Kintamosios srovės perdavimo sistemai aktyvus šuntinis filtras gali pašalinti harmoniką, pagerinti galios koeficientą ir subalansuoti apkrovas.
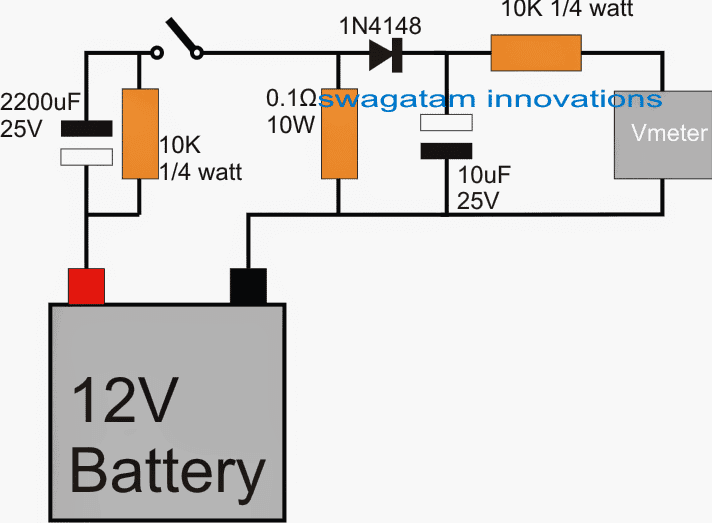
Transformatoriaus galios valdymas
Problemos pareiškimas:
1. Lėtinė aukšta įtampa dažniausiai siejama su per didele įtampos kritimo korekcija komunalinių paslaugų perdavimo ir paskirstymo sistemose. Elektros laidininkų įtampos kritimas yra įprasta situacija bet kur. Tačiau tokiose vietose, kur yra mažas elektrinės apkrovos tankis, pavyzdžiui, priemiesčiuose ir kaimo vietovėse, ilgas laidininkų darbas padidina problemą.
2. Dėl varžos įtampa mažėja laidininko ilgyje, nes srovės srautas didėja, kad patenkintų poreikį. Norėdami ištaisyti įtampos kritimą, įmonė naudoja įtampos keitimo įtampos reguliatorius (OLTC) ir linijos kritimą kompensuojančius įtampos reguliatorius (LDC), kad padidintų (pakeltų) arba padidintų (sumažintų) įtampą.
3. Klientai, esantys arčiausiai OLTC ar LDC, gali patirti per didelę įtampą, nes įmonė bando įveikti laidininko įtampos kritimą tiems klientams, esantiems tolimiausiame linijos gale.
4. Daugelyje vietų apkrovos valdomos įtampos kritimo poveikis vertinamas kaip kasdieniniai svyravimai, dėl kurių įtampos lygis yra didžiausias tuo metu, kai reikalingas mažiausias apkrovimas.
5. Dėl laikui bėgant kintančių apkrovų ir sklidimo netiesiškumas sukelia didelių trikdžių, kurie pateks į vartotojų linijas, dėl kurių visa sistema bus nesveika.
6. Mažiau tipišką aukštos įtampos problemų priežastį sukelia vietiniai transformatoriai, kurie buvo nustatyti didinti įtampą, kad kompensuotų sumažėjusį įtampos lygį. Dažniausiai tai įvyksta įrenginiuose, kuriuose skirstymo linijų gale yra didelė apkrova. Kai veikia sunkios apkrovos, palaikomas normalus įtampos lygis, tačiau išjungus krovinius, įtampos lygis kyla.
7. Keistų įvykių metu transformatorius perdega dėl jų apvijos perkrovos ir trumpojo jungimo. Taip pat padidėja alyvos temperatūra dėl padidėjusio jų vidinėmis apvijomis tekančios srovės lygio. Dėl to netikėtai padidėja įtampa, srovė ar temperatūra paskirstymo transformatoriuje.
8. Elektriniai prietaisai yra suprojektuoti veikti esant tam tikrai gaminio įtampai, kad būtų pasiektas nustatytas našumo, efektyvumo, saugumo ir patikimumo lygis. Naudojant elektrinį prietaisą, viršijantį nustatytą įtampos lygį, gali kilti problemų, tokių kaip gedimas, išjungimas, perkaitimas, priešlaikinis gedimas ir pan. Pvz., Galima tikėtis, kad spausdintinės plokštės eksploatavimo laikas viršija vardinę įtampą ilgus laikotarpius.

Transformatorius
Sprendimas:
- Mikrovaldikliu paremtos sistemos konstrukcija yra stebėti įtampos svyravimus transformatoriaus įvesties / išvesties pusėje ir gauti duomenis realiuoju laiku.
- Automatinio transformatoriaus čiaupo keitimo, naudojant servo / žingsninius variklius, sukūrimas.
- Sistema turėtų kelti pavojaus signalą esant slenkstinės įtampos lygiui ar avarinei situacijai.
- Sistema turėtų būti patikima.
- Sistema gali būti montuojama ant lauko transformatorių.
- Nuolatinio skirstomųjų transformatorių alyvos temperatūros stebėjimo planas bus lyginamas pagal nominalias vertes ir bus pasirūpinta atitinkamais veiksmais.
- Elektros sistemos tinkle naudokite tokius įrenginius kaip automatiniai įtampos stabilizatoriai (AVR), maitinimo sistemos stabilizatoriai, FAKTAI ir kt.
Techninės galimybės:
Mikrokontrolerio duomenų kaupimo sistema (MDLS):
MDLS nereikia papildomos aparatūros ir leidžia pasirinkti duomenų kiekį ir laiko intervalus tarp jų. Surinktus duomenis galima lengvai eksportuoti į kompiuterį per nuoseklųjį prievadą. MDLS yra labai kompaktiškas, nes jame naudojami keli integriniai grandynai. Pasirinktas MDLS dizainas turėtų atitikti šiuos reikalavimus
- Tai turėtų būti lengvai programuojama.
- Vartotojas turi galėti pasirinkti matavimo rodiklius.
- Ji turėtų atsarginę duomenų kopiją, kai trumpam sutrinka arba visiškai pašalinama „sys“ galia.
- Jis turėtų galėti eksportuoti duomenis į kompiuterį per nuoseklųjį prievadą.
- Tai turėtų būti paprasta ir nebrangi.
Tikiuosi, kad supratote lanksčios kintamosios srovės perdavimo koncepciją iš aukščiau pateikto straipsnio. Jei turite klausimų dėl šios koncepcijos ar elektros ir elektroniniai projektai palikite komentarų skiltį žemiau.
Nuotraukų kreditas
- Lankstus cir matematikos darbai