Kai išgirstame žodį operacinė sistema, pirmiausia kyla mintis, kad operacinė sistema naudojama nešiojamiesiems kompiuteriams ir kompiuteriams. Paprastai mes naudojame skirtingų tipų operacines sistemas, tokias kaip „Windows XP“, „Linux“, „Ubuntu“, „Windows 7,8.8.1“ ir „10“. Išmaniuosiuose telefonuose operacinės sistemos yra tokios kaip „KitKat“, „Jellybean“, „marshmallow“ ir „Nougat“. Skaitmeniniame elektroniniame įrenginyje yra tam tikra operacinė sistema, kurią sukūrė mikrovaldiklio programa . Yra skirtingų tipų operacinės sistemos sukurti mikrovaldikliui, tačiau čia aptarėme realaus laiko operacinę sistemą.
Kas yra operacinė sistema realiuoju laiku?
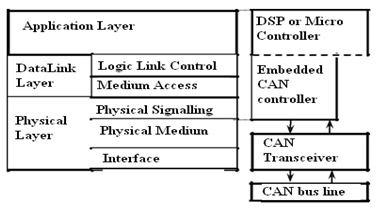
RTOS yra operacinė sistema, tai yra realaus laiko sistemos smegenys ir jos reakcija į įvestis iš karto. RTOS užduotis bus atlikta iki nurodyto laiko ir jos atsakymai numatomais būdais į nenuspėjamus įvykius. RTOS struktūra parodyta žemiau.

RTOS struktūra
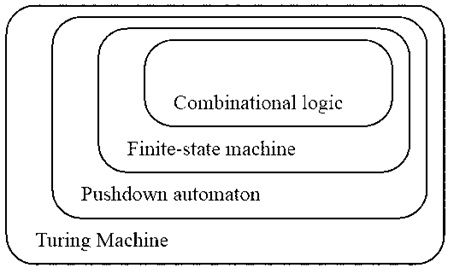
RTOS tipai
Yra trys skirtingi RTOS tipai
- Programinė įranga realiuoju laiku
- Sunki realaus laiko operacinė sistema
- Tvirta realaus laiko operacinė sistema

RTOS tipai
„Soft Real-Time“ operacinė sistema
„Soft“ realaus laiko operacinė sistema turi tam tikrus terminus, gali būti praleista ir jie imsis veiksmų t = 0 +. „Soft“ realiuoju laiku veikianti operacinė sistema yra OS rūšis ir joje nėra apribojimų ekstremalioms taisyklėms. Kritinis šios operacinės sistemos laikas yra šiek tiek atidėtas. Šios operacinės sistemos pavyzdžiai yra skaitmeninė kamera, mobilieji telefonai ir internetiniai duomenys ir kt.

„Soft Real-Time“ operacinė sistema
Sunki realaus laiko operacinė sistema
Tai taip pat yra OS tipas, kurį numatoma iki termino. Numatomi terminai bus sureaguoti t = 0. Kai kurie šios operacinės sistemos pavyzdžiai yra oro pagalvių valdymas automobiliuose, stabdžių antiblokavimas ir variklio valdymo sistema ir kt.
Tvirta realaus laiko operacinė sistema
Firmos realiuoju laiku operacinė sistema turi tam tikrus laiko apribojimus, jie nėra griežti ir gali sukelti nepageidaujamų padarinių. Šios operacinės sistemos pavyzdžiai yra vizualus pramoninės automatikos patikrinimas.
Darbas su realaus laiko operacine sistema
Yra keletas pagrindinių RTOS funkcijų tipų
- Prioritetu pagrįstas tvarkaraštis
- Sistemos laikrodžio pertraukimas
- Deterministinis elgesys
- Sinchronizavimas ir pranešimai
- RTOS paslauga
Prioritetu pagrįstas planuoklis
Prioritetu pagrįstame planuoklyje dauguma RTOS yra nuo 32 iki 256 galimų atskirų užduočių ar procesų prioritetų. Šis tvarkaraštis vykdys procesą su didžiausiu prioritetu. Jei užduotis vykdoma procesoriuje, tada vykdoma kita prioritetinė užduotis ir tęskite procesus.
Sistemoje didžiausio prioriteto procesas turės procesorių
- Jis bėga uždaryti
- Jei pradinė užduotis yra užblokuota naujoje, tada parengiamas aukšto prioriteto procesas.
Yra trys užduočių ar procesų būsenos, kurios yra panašios į paruoštas vykdyti, o kita yra užblokuota, o kiekvienos būsenos aprašymas pateiktas žemiau.
Paruošta paleisti
Teigiama, kad paruoštas paleisti yra tada, kai procesas turi visus išteklius paleisti, tačiau jis neturėtų būti vykdomas. Tada jis vadinamas paruoštu bėgimui.
Bėgimas
Jei užduotis vykdoma, sakoma, kad ji veikia.
Užblokuota
Šioje būsenoje, jei ji neturi pakankamai išteklių paleisti, ji siunčiama į užblokuotą būseną.
Trys metodai modifikuojami planuojant užduotį, yra jų aprašymas.
Bendradarbiavimas planavimas
Šio tipo planavimo metu užduotis bus vykdoma, kol bus baigtas vykdymas
Apskrito Robino planavimas
Šiame planavime kiekvienam procesui priskiriamas fiksuotas laiko tarpas, o procesas turi baigti vykdyti, kitaip užduotis praranda srautą ir duomenų generavimą.
Išankstinis planavimas
Išankstinis planavimas apima prioritetinį nuo laiko priklausantį laiko paskirstymą. Paprastai naudojami 256 prioriteto lygiai ir kiekviena užduotis turi unikalų prioriteto lygį. Yra keletas sistemų, palaikančių prioritetinį lygį, o kelios užduotys turi tam tikrus prioritetus.
Sistemos laikrodžio pertraukimas
Norėdami atlikti operaciją, reikalingą laiko atžvilgiu, RTOS pateiks tam tikrus sistemos laikrodžius. Jei yra 1ms sistemos laikrodis, užduotį turite atlikti per 50ms. Paprastai yra API, kuri seka jus sakydama „Po 50 minučių pažadink mane“. Taigi užduotis būtų miego būsenoje, kol RTOS pabus. Mes turime du pastebėjimus, kad pažadintas neužtikrins, kad važiuoti tiksliai tuo metu, tai priklauso nuo prioriteto ir, jei aukštesnis prioritetas yra vykdomas šiuo metu, jis būtų atidėtas.
Deterministinis elgesys
RTOS juda labai ilgai, kad apsaugotų, jog nesvarbu, ar atlikote 100 užduočių, ar 10 užduočių, atstumas neturi jokio skirtumo perjungti kontekstą ir tai lemia kitą prioritetinę užduotį. Pagrindiniame deterministiniame rajone RTOS yra pertraukimo valdymas, kai jiems pranešama apie pertraukimo liniją, RTOS nedelsdama imasi teisingos pertraukimo paslaugos rutinos veiksmų, o pertraukimas atliekamas be jokių delsimų.
Turime triukšmauti, kad projekto kūrėjai parašys konkrečios techninės įrangos ISR. Iki šiol RTOS suteikia ISR nuosekliems prievadams, sistemos laikrodžiams ir gali būti tinklo aparatinė įranga, tačiau jei yra kažkas specializuoto, pavyzdžiui, širdies stimuliatoriaus signalai, pavaros ir kt., Nėra RTOS dalis.
Viskas yra apie bendruosius apibendrinimus, o RTOS yra labai įvairi. Kai kurios RTOS veikia skirtingai, o aukščiau pateiktas aprašymas tinka didelei esamos RTOS daliai.
Sinchronizavimas ir pranešimai
Sinchronizavimas ir pranešimai teikia ryšį tarp vienos sistemos užduoties su kita sistema ir pranešimų tarnybų. Norėdami sinchronizuoti vidinę veiklą, naudojama įvykio vėliava ir siųsti tekstinius pranešimus, kuriuos galime naudoti pašto dėžutėje, vamzdeliuose ir pranešimų eilėse. Bendrose duomenų srityse naudojamos semaforos.
- Semaforai
- Įvykio vėliavos
- Pašto dėžutės
- Vamzdžiai
- Pranešimų eilės
RTOS tarnyba
Svarbiausia operacinės sistemos dalis yra branduolys. Norėdami stebėti aparatūrą, užduotis turėtų būti atleista, o atsakomybės branduolys tvarko ir paskirsto išteklius. Jei užduotis negali atkreipti CPU dėmesio kiekvieną kartą, tada yra keletas kitų branduolio teikiamų paslaugų. Tai yra
- Laiko paslaugos
- Pertraukiamo aptarnavimo paslaugos
- Įrenginių valdymo paslaugos
- Atminties valdymo paslaugos
- Įvesties-išvesties paslaugos
RTOS privalumai
- Kai visi ištekliai ir įrenginiai yra neaktyvūs, tada RTOS suteikia maksimalų sistemos suvartojimą ir daugiau produkcijos.
- Vykdant užduotį nėra galimybės gauti klaidos, nes RTOS yra be klaidų.
- Atminties paskirstymas yra geriausias valdyti tokio tipo sistemoje.
- Šio tipo sistemose perjungimo laikas yra labai trumpesnis.
- Dėl mažo programos dydžio RTOS yra naudojama programoje integruota sistema kaip transportas ir kiti.
Šiame straipsnyje aptarėme, kaip veiks realaus laiko operacinė sistema. Tikiuosi, kad perskaitę sužinojote pagrindinę informaciją. Jei turite klausimų apie šį straipsnį arba įgyvendinti elektros projektus , nedvejodami pakomentuokite žemiau esančiame skyriuje. Štai jums klausimas, kokios yra RTOS funkcijos?