
Kaip rodo pavadinimas, šiame straipsnyje bus pateikta tiksli idėja apie PID valdiklio struktūrą ir veikimą. Nepaisant to, įsigilinkime į PID valdiklius. PID valdikliai yra labai įvairūs pramoninių procesų valdymui. Maždaug 95% uždaro ciklo operacijų pramoninė automatika sektoriuje naudoti PID valdiklius. PID reiškia proporcinį-integralinį-išvestinį. Šie trys valdikliai yra sujungti taip, kad sukurtų valdymo signalą. Kaip grįžtamojo ryšio valdiklis, jis pateikia valdymo išvestį norimais lygiais. Prieš išradant mikroprocesorius, PID valdymą įgyvendino analoginiai elektroniniai komponentai. Tačiau šiandien visus PID valdiklius apdoroja mikroprocesoriai. Programuojami loginiai valdikliai taip pat turite integruoto PID valdiklio instrukcijas. Dėl PID valdiklių lankstumo ir patikimumo jie tradiciškai naudojami procesų valdymo programose.
Kas yra PID valdiklis?
Terminas PID reiškia proporcinį integralų darinį ir yra vienos rūšies įtaisas, naudojamas įvairiems proceso kintamiesiems, pavyzdžiui, slėgiui, srautui, temperatūrai ir greičiui, valdyti pramonėje. Šiame valdiklyje valdymo ciklo grįžtamojo ryšio įrenginys naudojamas visiems proceso kintamiesiems reguliuoti.
Šio tipo valdymas naudojamas sistemai vairuoti objektyvios vietos, kitaip lygios, kryptimi. Jis yra beveik visur temperatūros kontrolei ir naudojamas moksliniuose procesuose, automatikoje ir daugybėje chemikalų. Šiame valdiklyje uždaro ciklo grįžtamasis ryšys naudojamas palaikyti tikrąjį metodo išėjimą, panašų į tikslą, kuris, jei įmanoma, būtų išvestas fiksavimo taške. Šiame straipsnyje aptariamas PID valdiklio dizainas su juose naudojamais valdymo režimais, tokiais kaip P, I ir D.
Istorija
PID valdiklio istorija yra ta, kad 1911 metais Elmeras Sperry sukūrė pirmąjį PID valdiklį. Po to TIC („Taylor Instrumental Company“) buvo įdiegtas buvęs pneumatinis valdiklis, visiškai derinamas 1933 m. Po kelerių metų valdymo inžinieriai pašalino pusiausvyros būsenos klaidą, kuri randama proporcinguose valdikliuose, sureguliuojant galą iki kažkokios klaidingos vertės, kol klaida nebuvo nulis.
Šis pakartotinis derinimas apėmė klaidą, kuri vadinama proporciniu integruotu valdikliu. Po to, 1940 m., Išvestiniu būdu buvo sukurtas pirmasis pneumatinis PID valdiklis, siekiant sumažinti peržengimo problemas.
1942 m. „Ziegler & Nichols“ pristatė derinimo taisykles, kad inžinieriai galėtų nustatyti ir nustatyti tinkamus PID valdiklių parametrus. Pagaliau 1950 m. Viduryje pramonėje buvo plačiai naudojami automatiniai PID valdikliai.
PID valdiklio blokavimo schema
Uždaros grandinės sistemoje, tokioje kaip PID valdiklis, yra grįžtamojo ryšio valdymo sistema. Ši sistema įvertina grįžtamojo ryšio kintamąjį naudodama fiksuotą tašką, kad sugeneruotų klaidos signalą. Remiantis tuo, jis keičia sistemos išvestį. Ši procedūra tęsis tol, kol klaida pasieks nulį, kitaip grįžtamojo ryšio kintamojo vertė taps lygi fiksuotam taškui.
Šis valdiklis užtikrina gerus rezultatus, palyginti su ON / OFF tipo valdikliu. ĮJUNGIMO / IŠJUNGIMO tipo valdiklyje yra tik dvi sąlygos valdyti sistemą. Kai proceso vertė bus mažesnė už fiksuotą tašką, ji įsijungs. Panašiai jis išsijungs, kai vertė bus didesnė nei fiksuota. Tokio tipo valdiklio išvestis nėra stabili ir ji dažnai svyruos fiksuoto taško srityje. Tačiau šis valdiklis yra stabilesnis ir tikslesnis, palyginti su ON / OFF tipo valdikliu.

PID valdiklio darbas
PID valdiklio darbas
Naudojant pigų paprastą ON-OFF valdiklį, galima tik dvi valdymo būsenos, pavyzdžiui, visiškai ON arba OFF. Jis naudojamas ribotai kontrolei, kai kontrolės tikslui pakanka šių dviejų valdymo būsenų. Tačiau svyruojantis šio valdymo pobūdis riboja jo naudojimą, todėl jį keičia PID valdikliai.
PID valdiklis palaiko išvestį taip, kad uždaro ciklo operacijomis tarp proceso kintamojo ir nustatytos vertės / norimo išėjimo nebūtų nulinės paklaidos. PID naudoja tris pagrindinius valdymo veiksmus, kurie paaiškinti toliau.
P- valdiklis
Proporcinis arba P valdiklis suteikia išvestį, proporcingą dabartinei paklaidai e (t). Jis lygina norimą ar nustatytą tašką su faktine verte arba grįžtamojo ryšio proceso verte. Gauta paklaida padauginama iš proporcinės konstantos, kad gautumėte išvestį. Jei klaidos reikšmė lygi nuliui, ši valdiklio išvestis yra lygi nuliui.

P-valdiklis
Šiam valdikliui reikalingas šališkumas arba rankinis nustatymas iš naujo, kai naudojamas atskirai. Taip yra todėl, kad jis niekada nepasiekia pastovios būsenos. Tai užtikrina stabilų veikimą, tačiau visada išlaiko pastoviosios būsenos paklaidą. Atsakymo greitis padidėja, kai proporcinė konstanta Kc didėja.

P valdiklio atsakas
Aš-valdiklis
Dėl p valdiklio apribojimo, kai visada yra poslinkis tarp proceso kintamojo ir nustatytos vertės, reikalingas I valdiklis, kuris suteikia būtinus veiksmus, kad pašalintų pastoviosios būsenos klaidą. Ji integruoja klaidą per tam tikrą laikotarpį, kol klaidos vertė pasieks nulį. Ji palaiko galutinio valdymo įtaiso vertę, kai paklaida tampa lygi nuliui.

PI valdiklis
Integralus valdymas sumažina jo išėjimą, kai įvyksta neigiama klaida. Tai riboja atsako greitį ir daro įtaką sistemos stabilumui. Atsakymo greitis padidėja mažinant integralo stiprinimą Ki.

PI valdiklio atsakymas
Aukščiau pateiktame paveikslėlyje, mažėjant I-valdiklio stiprinimui, pastoviosios būsenos paklaida taip pat mažėja. Daugeliu atvejų PI valdiklis naudojamas ypač ten, kur nereikia didelio greičio reakcijos.
Naudojant PI valdiklį, I valdiklio išvestis yra ribojama tam tikru diapazonu, kad įveiktų vientisas likvidavimas sąlygos, kai vientisa išvestis didėja net esant nulinei paklaidos būsenai dėl nelinijinių gamykloje.
D valdiklis
Aš-valdiklis neturi galimybių numatyti būsimo klaidų elgesio. Taigi, pakeitus nustatytą tašką, jis reaguoja paprastai. D valdiklis šią problemą įveikia numatydamas būsimą klaidos veikimą. Jo išvestis priklauso nuo paklaidos greičio laiko atžvilgiu greičio, padauginto iš išvestinės konstantos. Tai suteikia smūgio pradžią išėjimui ir taip padidina sistemos atsaką.

PID valdiklis
Aukščiau pateiktame D paveikslo atsakyme valdiklio yra daugiau, palyginti su PI valdikliu, taip pat sumažėja išėjimo nusistovėjimo laikas. Tai pagerina sistemos stabilumą kompensuodamas I valdiklio sukeltą fazės atsilikimą. Padidinus išvestinį pelną, padidėja atsako greitis.

PID valdiklio atsakymas
Taigi galiausiai pastebėjome, kad sujungę šiuos tris valdiklius galime gauti norimą sistemos atsaką. Skirtingi gamintojai kuria skirtingus PID algoritmus.
PID valdiklio tipai
PID valdikliai skirstomi į tris tipus, tokius kaip ON / OFF, proporciniai ir standartiniai valdikliai. Šie valdikliai naudojami remiantis valdymo sistema, vartotojas gali naudoti valdiklį metodo reguliavimui.
ON / OFF valdymas
Įjungimo ir išjungimo valdymo metodas yra paprasčiausias prietaisų tipas, naudojamas temperatūros kontrolei. Prietaiso išvestis gali būti ĮJUNGTA / IŠJUNGTA be centrinės būsenos. Šis valdiklis įjungs išėjimą tiesiog temperatūrai peržengus fiksuotą tašką. Ribinis valdiklis yra tam tikros rūšies įjungimo / išjungimo valdiklis, kuris naudoja fiksavimo relę. Ši relė atstatoma rankiniu būdu ir naudojama metodui išjungti, kai pasiekiama tam tikra temperatūra.
Proporcinga kontrolė
Šis reguliatorius skirtas pašalinti ciklą, sujungtą per ON / OFF valdiklį. Šis PID valdiklis sumažins įprastą energiją, kuri tiekiama į šildytuvą, kai temperatūra pasieks nustatytą tašką.
Šis valdiklis turi vieną funkciją, leidžiančią valdyti šildytuvą, kad jis neviršytų nustatyto taško, tačiau jis pasieks fiksuotą tašką palaikydamas pastovią temperatūrą.
Šį proporcingą veiksmą galima pasiekti įjungiant ir išjungiant išėjimą mažiems laikotarpiams. Ši laiko proporcija pakeis temperatūros reguliavimo santykį nuo įjungimo laiko iki išjungimo laiko.
Standartinio tipo PID valdiklis
Tokio tipo PID valdiklis sujungs proporcingą valdymą per integruotą ir išvestinį valdymą, kad automatiškai padėtų įrenginiui kompensuoti sistemos pakeitimus. Šios modifikacijos, integralas ir išvestinė yra išreikštos laiko vienetais.
Šie valdikliai taip pat yra nukreipiami per jų abipusius, RATE & RESET. PID sąlygos turi būti koreguojamos atskirai, kitaip suderinus su konkrečia sistema su bandymu ir klaidomis. Šie valdikliai pasiūlys tiksliausią ir tolygų 3 valdiklių tipų valdymą.
Realaus laiko PID valdikliai
Šiuo metu rinkoje yra įvairių rūšių PID valdiklių. Šie valdikliai naudojami pramoninės kontrolės reikalavimams, pvz., Slėgiui, temperatūrai, lygiui ir srautui. Kai šie parametrai yra valdomi per PID, pasirenkamas atskiras PID valdiklis arba PLC.
Šie atskiri valdikliai naudojami visur, kur reikia patikrinti dvi kilpas, taip pat valdyti kitaip tomis sąlygomis, kur sudėtinga teisė patekti į didesnes sistemas.
Šie valdymo prietaisai suteikia skirtingą pasirinkimą valdant atskirą ir dvigubą kilpą. Autonominiai PID valdikliai pateikia keletą fiksuoto taško konfigūracijų, kad būtų galima sukurti autonominius kelis aliarmus.
Šiuos atskirus valdiklius daugiausia sudaro „Honeywell“ PID valdikliai, „Yokogawa“ temperatūros reguliatoriai, OMEGA, „Siemens“ ir ABB valdikliai.
PLC yra naudojami kaip PID valdikliai daugumoje pramoninio valdymo programų. PID blokai gali būti išdėstyti PAC arba PLC, kad būtų galima pasirinkti tikslesnį PLC valdymą. Šie valdikliai yra protingesni ir galingesni, palyginti su atskirais valdikliais. Kiekviename PLC programinės įrangos programoje yra PID blokas.
Derinimo metodai
Prieš pradedant PID valdiklio darbą, jis turi būti sureguliuotas taip, kad atitiktų valdomo proceso dinamiką. Dizaineriai pateikia numatytąsias P, I ir D terminų vertes, o šios vertės negalėjo suteikti norimo našumo ir kartais sukelia nestabilumą ir lėtą valdymo našumą. Sukurti įvairių tipų derinimo metodai, skirti PID valdikliams sureguliuoti, reikalauja daug operatoriaus dėmesio, kad būtų parinktos geriausios proporcinio, integralinio ir išvestinio pelno vertės. Kai kurie iš jų pateikti žemiau.
PID valdikliai naudojami daugumoje pramoninių programų, tačiau reikia žinoti šio valdiklio nustatymus, kad tinkamai jį sureguliuotumėte, norėdami sukurti pageidaujamą išvestį. Čia derinimas yra ne kas kita, o procedūra, kaip gauti idealų atsakymą iš valdiklio nustatant geriausią proporcingą pelną, integralinius ir išvestinius veiksnius.
Norimą PID valdiklio išvestį galima gauti sureguliuojant valdiklį. Norint gauti reikiamą valdiklio išvestį, yra įvairių būdų, tokių kaip bandymai ir klaidos, Zeiglerio-Nicholso ir proceso reakcijos kreivė. Dažniausiai naudojami bandymai ir klaidos, „Zeigler-Nichols“ ir kt.
Bandymo ir klaidos metodas: Tai paprastas PID valdiklio derinimo metodas. Kol sistema ar valdiklis veikia, mes galime sureguliuoti valdiklį. Pagal šį metodą pirmiausia turime nustatyti Ki ir Kd reikšmes į nulį ir padidinti proporcingą terminą (Kp), kol sistema pasieks svyruojančią elgseną. Kai jis svyruoja, sureguliuokite Ki (Integral term), kad svyravimai sustotų ir galiausiai sureguliuokite D, kad gautumėte greitą atsaką.
Proceso reakcijos kreivės technika: Tai atviro ciklo derinimo technika. Tai sukuria atsaką, kai sistemai taikoma žingsnio įvestis. Iš pradžių turime rankiniu būdu pritaikyti tam tikrą valdymo išvestį sistemai ir įrašyti atsako kreivę.
Po to turime apskaičiuoti nuolydį, negyvą laiką, kreivės pakilimo laiką ir galiausiai pakeisti šias reikšmes P, I ir D lygtimis, kad gautume PID terminų padidėjimo reikšmes.

Proceso reakcijos kreivė
Zeiglerio-Nicholso metodas: Zeigler-Nichols pasiūlė uždaro ciklo metodus PID valdikliui derinti. Tai yra nepertraukiamo ciklo ir slopinto virpesių metodas. Abiejų metodų procedūros yra vienodos, tačiau svyravimo elgsena skiriasi. Pirmiausia, mes turime nustatyti p-valdiklio konstantą Kp į tam tikrą vertę, o Ki ir Kd reikšmės yra lygios nuliui. Proporcinis padidėjimas didinamas tol, kol sistema svyruoja pastovioje amplitudėje.
Pelnas, kai sistema sukuria pastovius svyravimus, vadinamas galutiniu pelnu (Ku), o virpesių periodas - galutiniu periodu (Pc). Kai jis bus pasiektas, Zeiglerio-Nicholso lentelėje PID valdiklyje galime įvesti P, I ir D reikšmes, priklausomai nuo naudojamo valdiklio, pvz., P, PI ar PID, kaip parodyta žemiau.

Zeiglerio-Nicholso lentelė
PID valdiklio struktūra
PID valdiklį sudaro trys terminai, būtent proporcinis, integralinis ir išvestinis valdymas. Bendras šių trijų valdiklių veikimas suteikia proceso valdymo valdymo strategiją. PID valdiklis valdo proceso kintamuosius, tokius kaip slėgis, greitis, temperatūra, srautas ir kt. Kai kurios programos naudoja PID valdiklius kaskados tinkluose, kur valdymui pasiekti naudojami du ar daugiau PID.

PID valdiklio struktūra
Aukščiau pateiktame paveikslėlyje parodyta PID valdiklio struktūra. Jis susideda iš PID bloko, kuris išleidžia procesoriaus bloką. Procesą / įrenginį sudaro galutiniai valdymo įtaisai, tokie kaip pavaros, valdymo vožtuvai ir kiti valdymo įtaisai, skirti valdyti įvairius pramonės / gamyklos procesus.
Proceso įrenginio grįžtamojo ryšio signalas palyginamas su nustatytu tašku arba atskaitos signalu u (t) ir atitinkamas klaidos signalas e (t) tiekiamas į PID algoritmą. Pagal algoritmo proporcinio, integralinio ir išvestinio valdymo skaičiavimus valdiklis sukuria kombinuotą atsaką arba valdomą išėjimą, kuris taikomas augalų valdymo įtaisams.
Visoms valdymo programoms nereikia visų trijų valdymo elementų. Deriniai, tokie kaip PI ir PD valdikliai, labai dažnai naudojami praktikoje.
Programos
PID valdiklio programose yra:
Geriausia PID valdiklio programa yra temperatūros valdymas, kai valdiklis naudoja temperatūros jutiklio įvestį ir jo išvestį galima susieti su valdymo elementu, pvz., Ventiliatoriumi ar šildytuvu. Paprastai šis valdiklis yra tiesiog vienas elementas temperatūros reguliavimo sistemoje. Pasirenkant tinkamą valdiklį, reikia išnagrinėti ir apsvarstyti visą sistemą.
Krosnies temperatūros valdymas
Paprastai krosnys naudojamos šildymui, taip pat jose laikomas didžiulis žaliavos kiekis esant didžiulei temperatūrai. Įprasta, kad užimama medžiaga apima didžiulę masę. Todėl reikia didelio inercijos kiekio, o medžiagos temperatūra greitai nesikeičia, net kai naudojama didžiulė šiluma. Ši funkcija suteikia vidutiniškai stabilų PV signalą ir leidžia išvestiniam laikotarpiui efektyviai ištaisyti gedimą be didelių FCE ar CO pokyčių.
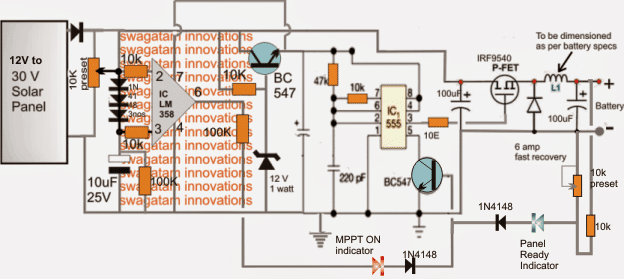
MPPT įkrovimo valdiklis
Fotoelektros elemento V-I charakteristika daugiausia priklauso nuo temperatūros diapazono ir apšvitos. Atsižvelgiant į oro sąlygas, srovė ir darbinė įtampa nuolat keisis. Taigi nepaprastai svarbu sekti aukščiausią efektyvios fotovoltinės sistemos „PowerPoint“. PID valdiklis yra naudojamas surasti MPPT, suteikiant PID valdikliui fiksuotus įtampos ir srovės taškus. Pakeitus oro sąlygoms, sekimo aparatas palaiko stabilią srovę ir įtampą.
Maitinimo elektronikos keitiklis
Mes žinome, kad keitiklis yra galios elektronikos taikymas, todėl keitikliuose dažniausiai naudojamas PID valdiklis. Kai keitiklis sujungiamas per sistemą, atsižvelgiant į apkrovos pokyčius, keitiklio išvestis bus pakeista. Pavyzdžiui, keitiklis yra susijęs su apkrova. Didžiulė srovė tiekiama padidinus apkrovas. Taigi įtampos ir srovės parametras nėra stabilus, tačiau jis pasikeis atsižvelgiant į reikalavimą.
Esant tokiai būsenai, šis valdiklis generuos PWM signalus, kad suaktyvintų keitiklio IGBT. Atsižvelgiant į apkrovos pokyčius, atsako signalas pateikiamas PID valdikliui, kad jis sukeltų n klaidą. Šie signalai generuojami remiantis gedimo signalu. Šioje būsenoje mes galime gauti keičiamą įvestį ir išvestį per panašų keitiklį.
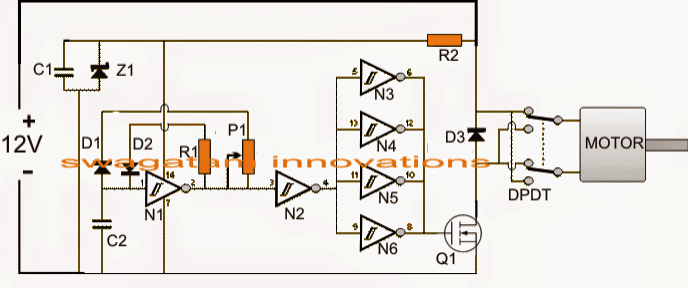
PID valdiklio taikymas: Uždaras nuolatinės srovės variklio kilpos valdymas
PID valdiklio sąsaja
PID valdiklio dizainą ir sąsają galima atlikti naudojant „Arduino“ mikrovaldiklį. Laboratorijoje „Arduino“ pagrįstas PID valdiklis sukurtas naudojant „Arduino UNO“ plokštę, elektroninius komponentus, termoelektrinį aušintuvą, o šioje sistemoje naudojamos programinės įrangos programavimo kalbos yra C arba C ++. Ši sistema naudojama temperatūros kontrolei laboratorijoje.
Konkretaus valdiklio PID parametrai randami fiziškai. Įvairių PID parametrų funkcija gali būti įgyvendinta naudojant tolesnį skirtingų valdiklių formų kontrastą.
Ši sąsajos sistema gali efektyviai apskaičiuoti temperatūrą per ± 0,6 ℃ paklaidą, o pastovi temperatūra reguliuojama tiesiog pasiekus nedidelį skirtumą nuo pageidaujamos vertės. Šioje sistemoje vartojamos sąvokos suteiks nebrangų ir tikslius metodus, kaip valdyti fizinius parametrus pageidaujamame diapazone laboratorijoje.
Taigi šiame straipsnyje aptariama PID valdiklio apžvalga, apimanti istoriją, blokinę diagramą, struktūrą, tipus, darbą, derinimo metodus, sąsają, pranašumus ir programas. Tikimės, kad pavyko suteikti pagrindinių, tačiau tikslių žinių apie PID valdiklius. Čia yra paprastas klausimas jums visiems. Kuris metodas tarp skirtingų derinimo metodų yra tinkamiausias norint pasiekti optimalų PID valdiklio darbą ir kodėl?
Prašome atsakymus pateikti žemiau esančiame komentarų skyriuje.
Nuotraukų kreditai
PID valdiklio blokinė schema wikimedia
PID valdiklio struktūra, P valdiklis, P - valdiklio atsakas ir PID valdiklis dienoraštis.opticontrols
P - valdiklio atsakymas kontroliuoja.inžin.umich
PI- valdiklio atsakymas m. valgyti
PID valdiklio atsakymas wikimedia
Zeiglerio-Nicholso lentelė kontroliuoja.variklis







{kind=link}
{kind=link}
{kind=link}
{kind=link}