Elektrinė mašina, kuri paverčia elektros energiją į mechaninę energiją vadinamas elektros varikliu. Visų pirma elektrinis variklis yra paprastas elektrostatinis prietaisas, kurį 1740-aisiais sukūrė škotų vienuolis Andrew Gordonas. Bet 1821 m. Michaelas Faraday pademonstravo elektros energijos pavertimą mechanine.
Elektros varikliai pirmiausia skirstomi į dvi kategorijas: kintamosios srovės varikliai ir Nuolatinės srovės varikliai . Vėlgi, kiekviena kategorija yra suskirstyta į daugelį tipų. Daugelis krovinių, tokių kaip maišytuvas, malūnėlis, ventiliatoriai ir kt., Dažniausiai naudojami buitiniai prietaisai, kuriuose galime rasti įvairių tipų variklių, kuriuos galima valdyti skirtingu greičiu, valdant variklių greitį. Šiame straipsnyje aptarsime vieną iš pagrindinių nuolatinės srovės variklių tipų, būtent Žingsninis variklis ir jo valdymas naudojant mikrovaldiklį.
Žingsninis variklis
Sinchroninis ir bešepetinis nuolatinės srovės variklis kuris paverčia elektrinius impulsus į mechaninius judesius ir tokiu būdu sukasi palaipsniui su tam tikru kampu tarp kiekvieno žingsnio, kad būtų baigtas visas sukimasis, vadinamas „Stepper“ varikliu. Kampas tarp žingsninio variklio sukimosi žingsnių vadinamas variklio žingsnio kampu.

Žingsninis variklis
Žingsniniai varikliai pagal jų apviją skirstomi į du tipus: „Unipolar Stepper“ ir „Bipolar Stepper“ varikliai. Vienpolis žingsninis variklis dažnai naudojamas daugelyje programų dėl savo paprasto veikimo, palyginti su dvipoliu žingsniniu varikliu. Tačiau yra įvairių tipų žingsninių variklių, tokių kaip nuolatinio magneto žingsninis variklis, kintamo reluktyvumo žingsninis variklis ir hibridinis žingsninis variklis.
Žingsninio variklio valdymas
Žingsninį variklį galima valdyti įvairiais būdais, tačiau čia aptariame žingsninio variklio valdymą naudodami Mikrovaldiklis „Atmega“ . 89C51 yra mikrovaldiklis 8051 mikrovaldiklių šeima .

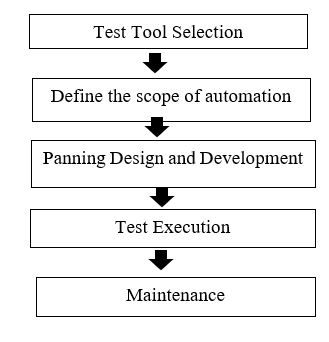
Blokinė žingsninio variklio valdymo schema
Žingsninio variklio valdymo naudojant 8051 mikrovaldiklį blokinė schema parodyta paveiksle su maitinimo šaltinis , mikrovaldiklis, žingsninis variklis ir valdymo jungiklių blokai.
2 žingsnių variklio valdymo grandinės projektavimo metodai
Sukurtas žingsninio variklio valdiklis naudojant 8051 mikrovaldiklius ir perjungimo grandinė, skirta valdyti žingsninio variklio greitį. Valdymo jungiklio grandinė gali būti suprojektuota naudojant tranzistorių jungikliai arba vietoj tranzistorių naudojant žingsninio variklio valdiklį IC, pvz., ULN2003.
1. Valdymo grandinė, naudojant žingsninio variklio valdiklio IC
Vienpolį žingsninį variklį galima pasukti įjungiant statoriaus ritinius iš eilės. Šių įtampos signalų, taikomų per variklio ritinius ar laidus, seka yra pakankama varikliui valdyti, taigi, norint valdyti statoriaus ritinių srovės kryptį, nereikia jokios tvarkyklės grandinės.

Žingsninio variklio valdymas naudojant IC
Dviejų fazių žingsninis variklis susideda iš keturių galinių laidų, sujungtų su ritėmis, ir dviejų bendrų laidų, sujungtų su dviem galiniais laidais, sudarančioms dvi fazes. Dviejų fazių bendri taškai ir galiniai taškai yra atitinkamai prijungti prie žemės arba Vcc ir mikrovaldiklio kaiščių. Norint pasukti variklį, įjungiami dviejų fazių galiniai taškai. Pirmiausia įtampa taikoma pirmajam fazės1 galutiniam taškui, o tolesnė įtampa - pirmajam 2 fazės galiniam taškui ir pan.
Žingsninį variklį galima valdyti įvairiais režimais, tokiais kaip „Wave Drive Steping Mode“, „Full Drive Steping Mode“ ir „Half Drive Steping Mode“.
Bangų pavaros žingsninis režimas
Kartojant aukščiau pateiktą seką, variklis gali būti pasuktas bangų pavaros žingsnio režimu pagal laikrodžio rodyklę arba prieš laikrodžio rodyklę, atsižvelgiant į pasirinktus galinius taškus. Žemiau esančioje lentelėje parodyta signalo fazių seka bangų pavaros žingsniavimo režimu.


Bangų pavaros žingsninis režimas
„Full Drive Steping“ režimas
Įjungus du skirtingų fazių galinius taškus vienu metu pasiekiamas visiško pavaros žingsnio režimas. Lentelėje parodyta signalo fazių seka, kai režimas yra visas pavara.


„Full Drive Steping“ režimas
„Half Drive Stepping“ režimas
Derinant bangos ir pilno važiavimo režimų žingsnius, gaunamas pusės važiavimo žingsnio režimas. Taigi šiuo režimu žingsnio kampas padalijamas į pusę. Lentelėje parodyta signalo fazių seka pusės pavaros žingsnio režimu.


„Half Drive Stepping“ režimas
Apskritai žingsnio kampas priklauso nuo žingsninio variklio skiriamosios gebos. Žingsnių dydis ir sukimosi kryptis yra tiesiogiai proporcingi įvesties sekos skaičiui ir tvarkai. Veleno sukimosi greitis priklauso nuo įvesties sekos dažnio. Sukimo momentas ir vienu metu įmagnetintų magnetų skaičius yra proporcingi.
Žingsniniam varikliui reikalinga 60mA srovė, tačiau „Atmega“ mikrovaldiklio AT89C51 maksimali srovė yra 50mA. Taigi, žingsninis variklis-valdiklis IC yra naudojamas sąsajai su pakopos varikliu su mikrovaldikliu signalams perduoti.
2. Valdymo jungiklio grandinė naudojant tranzistorius
Maitinimo šaltinis grandinei gali būti pateiktas sumažinant įtampą nuo 230 V iki 7,5 V, naudojant pakaitinį transformatorių, tada taisymas tilto lygintuvu su diodais . Ši ištaisyta išvestis tiekiama į filtro kondensatorių ir tada perduodama per įtampos reguliatorių. 5 V reguliuojama išvestis gaunama iš įtampos reguliatoriaus. Atstatymo kaištis9 yra prijungtas tarp kondensatoriaus ir rezistoriaus.

Žingsninio variklio valdymo grandinė naudojant tranzistorių
Paprastai žingsninis variklis susideda iš keturių ritinių, kaip parodyta paveikslėlyje. Taigi, norint variklį valdyti, reikalingos keturios variklio ir vairuotojo grandinės. Užuot varikliui valdyti naudojant žingsninio variklio valdiklį IC, keturi tranzistoriai yra prijungti kaip vairuotojo grandinės atitinkamai prie 21, 22, 23 ir 24 mikrovaldiklio kaiščių.
Jei tranzistoriai pradeda laidumą, aplink ritę bus sukurtas magnetinis laukas, sukeliantis variklio sukimąsi. Žingsnio variklio greitis yra tiesiogiai proporcingas įėjimo impulsų dažniui. Kristalinis osciliatorius yra prijungtas prie kaiščių 18 ir 19, kad mikrovaldiklio laikrodžio dažnis būtų maždaug 11,019MHz.
Bet kurios instrukcijos vykdymo laiką galima apskaičiuoti pagal žemiau pateiktą formulę
Laikas = ((C * 12)) / f
Kur C = ciklo numeris
F = kristalų dažnis
Toliau aprašyta viena iš taikomųjų programų grandinių, naudojanti žingsninį variklį, kad suktųsi saulės kolektoriai.
Žingsninio variklio valdymas naudojant užprogramuotą 8051 mikrovaldiklį
Saulės stebėjimo saulės kolektorių projektas yra skirtas maksimaliam energijos kiekiui generuoti automatiškai reguliuojant saulės kolektorių. Šiame projekte žingsninis variklis, valdomas užprogramuoto 8051 šeimos mikrovaldiklio, yra sujungtas su saulės kolektoriais, kad saulės kolektorių veidas būtų visada statmenas saulei.

Žingsninio variklio valdymas naudojant mikrovaldiklį, Edgefxkits.com
užprogramuotas mikrovaldiklis generuoja pakopinius elektros impulsus reguliariais žingsniais į žingsninį variklį, kad suktųsi saulės kolektorius. Vairuotojo IC naudojamas žingsniniam varikliui vairuoti, nes valdiklis negali pateikti variklio galios.
Palikite savo pasiūlymus, atsiliepimus ir klausimus pateikdami komentarus žemiau esančiame komentarų skyriuje. Mes padarysime viską, kad galėtume jums techniškai padėti dėl šio straipsnio ir plėtojant elektros ir elektronikos projektus naudojant žingsninį variklį.