Minkštas starteris yra bet koks įtaisas, valdantis elektros variklio pagreitį, valdant veikiamą įtampą.
Dabar trumpai prisiminkime, ar reikia turėti bet kurio variklio starterį.
Indukcinis variklis gali savaime prasidėti dėl besisukančio magnetinio lauko srauto ir rotoriaus apvijos srauto sąveikos, dėl to padidėja rotoriaus srovė, kai padidėja sukimo momentas. Dėl to statorius ima didelę srovę ir, kol variklis pasiekia visišką greitį, ištraukiamas didelis srovės kiekis (didesnis už vardinę), ir tai gali sukelti variklio įšilimą, galiausiai jį sugadindamas. Norėdami to išvengti, reikalingi variklių paleidikliai.
Variklis gali būti įjungtas 3 būdais
- Visos apkrovos įtampos taikymas laiko intervalais: Tiesioginis paleidimas iš linijos
- Sumažintos įtampos taikymas palaipsniui: „Star Delta Starter“ ir „Soft starter“
- Dalies apvijos paleidimo taikymas: automatinio transformatoriaus starteris
„Minkšto paleidimo“ apibrėžimas
Dabar atkreipkime ypatingą dėmesį į minkštą paleidimą.
Technine prasme, minkštas starteris yra bet koks įtaisas, sumažinantis elektros varikliui taikomą sukimo momentą. Paprastai jis susideda iš kietojo kūno įtaisų, tokių kaip tiristoriai, skirti valdyti variklio maitinimo įtampą. Starteris veikia tuo, kad sukimo momentas yra proporcingas pradinės srovės kvadratui, kuris savo ruožtu yra proporcingas pritaikytai įtampai. Taigi sukimo momentą ir srovę galima reguliuoti sumažinant įtampą variklio paleidimo metu.
Naudojant minkštą starterį, valdymas gali būti dviejų tipų:
Atidarykite „Control“ : Paleidimo įtampa naudojama laikui bėgant, neatsižvelgiant į ištraukiamą srovę ar variklio greitį. Kiekvienai fazei du SCR yra sujungiami atgal ir SCR iš pradžių atliekami 180 laipsnių vėlavimu per atitinkamus pusės bangos ciklus (kuriuos atlieka kiekvienas SCR). Šis vėlavimas palaipsniui mažinamas, kol naudojama įtampa pakyla iki visos maitinimo įtampos. Tai taip pat žinoma kaip laiko įtampos rampos sistema. Šis metodas nėra aktualus, nes jis nekontroliuoja variklio pagreičio.
Uždarojo ciklo valdymas : Stebima bet kuri variklio išėjimo charakteristika, pvz., Ištraukiama srovė arba greitis, o paleidimo įtampa atitinkamai modifikuojama, kad gautų reikiamą atsaką. Stebima kiekvienos fazės srovė ir, jei ji viršija tam tikrą nustatytą tašką, laiko įtampos rampa sustabdoma.
Taigi pagrindinis minkšto starterio principas yra valdyti SCR laidumo kampą, todėl galima valdyti maitinimo įtampą.
2 Pagrindinio minkšto starterio komponentai
- Maitinimo jungikliai kaip SCR, kuriuos reikia valdyti fazėmis taip, kad jie būtų taikomi kiekvienai ciklo daliai. 3 fazių varikliui du SCR yra prijungti atgal kiekvienai fazei. Perjungimo įtaisai turi būti bent tris kartus didesni už tinklo įtampą.
- Valdymo logika naudojant PID valdiklius ar mikrovaldiklius ar bet kurią kitą logiką, norint kontroliuoti vartų įtampos taikymą SCR, t. y. valdyti SCR šaudymo kampą, kad SCR veiktų reikiamoje maitinimo įtampos ciklo dalyje.
Darbinis 3 fazių asinchroninio variklio minkštos paleidimo sistemos pavyzdys
Sistema susideda iš šių komponentų.
- Po du kiekvienos fazės SCR, t. Y. 6 SCR.
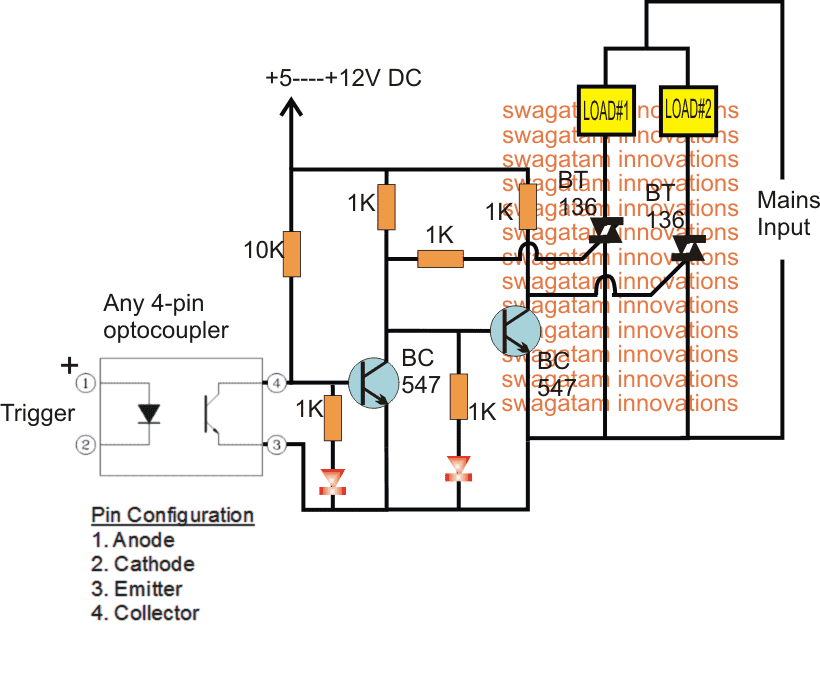
- Valdymo logikos schema, sudaryta iš dviejų palyginamųjų formų - LM324 ir LM339, kad būtų sukurtas lygis ir rampos įtampa, ir optoizoliatorius, skirtas kontroliuoti vartų įtampos taikymą kiekvienam SCR kiekvienoje fazėje.
Maitinimo grandinė, užtikrinanti reikiamą nuolatinės srovės maitinimo įtampą.

Blokinė schema, rodanti 3 fazių asinchroninio variklio elektroninę minkšto paleidimo sistemą
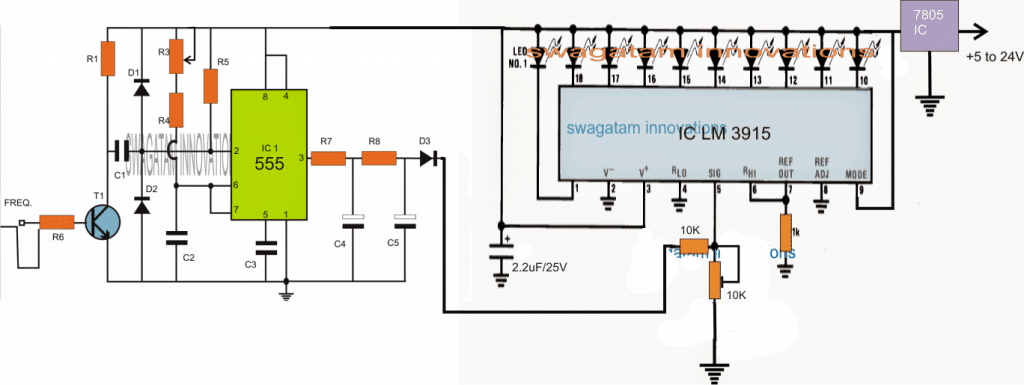
Lygio įtampa generuojama naudojant komparatorių LM324, kurio invertuojantis gnybtas maitinamas naudojant fiksuotą įtampos šaltinį, o neinvertinis gnybtas - per kondensatorių, prijungtą prie NPN tranzistoriaus kolektoriaus. Kondensatoriaus įkrovimas ir iškrovimas lemia, kad atitinkamai keičiasi komparatoriaus išvestis, o įtampos lygis keičiasi nuo aukštos iki mažos. Ši išėjimo lygio įtampa taikoma kito lygintuvo LM339, kurio invertuojantis gnybtas tiekiamas naudojant rampos įtampą, neinvertuojančiam terminalui. Ši rampos įtampa gaunama naudojant kitą lygintuvą LM339, kuris palygina pulsuojančią nuolatinės srovės įtampą, įjungtą jo invertuojančiame gnybte, su gryna nuolatinės įtampos įtampa jo neinvertuojančiame gnybte ir sukuria nulinės įtampos atskaitos signalą, kuris paverčiamas rampos signalu įkraunant ir iškraunant elektrolito kondensatorius.
3rdLyginamasis LM339 sukuria didelio impulso pločio signalą kiekvienai aukšto lygio įtampai, kuris palaipsniui mažėja, kai lygio įtampa mažėja. Šis signalas yra apverstas ir nukreipiamas į optoizoliatorių, kuris suteikia vartų impulsus SCR. Krintant įtampos lygiui, optoizoliatoriaus pulso plotis didėja, o pulso plotis yra mažesnis, o vėlavimas yra mažesnis ir palaipsniui SCR paleidžiamas be jokių vėlavimų. Taigi kontroliuojant trukmę tarp impulsų arba vėlavimą tarp impulsų, valdomas SCR šaudymo kampas ir maitinimo srovės naudojimas, taip kontroliuojant variklio išėjimo momentą.
Visas procesas yra atviros kilpos valdymo sistema, kai vartų paleidimo impulsų taikymo laikas kiekvienam SCR yra valdomas atsižvelgiant į tai, kaip anksčiau rampos įtampa sumažėja nuo lygio įtampos.
„Soft Start“ privalumai
Dabar, kai sužinojome, kaip elektroninė minkšto paleidimo sistema veikia, prisiminkime keletą priežasčių, kodėl jai teikiama pirmenybė prieš kitus metodus.
- Pagerintas efektyvumas : Minkštojo paleidimo sistemos efektyvumas naudojant kietojo kūno jungiklius yra labiau susijęs su maža įtampa.
- Kontroliuojamas paleidimas : Pradinę srovę galima valdyti sklandžiai, lengvai pakeičiant pradinę įtampą, ir tai užtikrina sklandus pradžia variklio be jokių trūkčiojimų.
- Valdomas pagreitis : Variklio pagreitis valdomas sklandžiai.
- Maža kaina ir dydis : Tai užtikrinama naudojant kietojo kūno jungiklius.




![12 V akumuliatorių įkroviklio grandinės [naudojant LM317, LM338, L200, tranzistorius]](https://electronics.jf-parede.pt/img/battery-chargers/11/12v-battery-charger-circuits-using-lm317.png)