Šiame įraše aptarsime kvadrokopterių kėbulo surinkimo naudojant aliuminio vamzdžius ir varžtus pagrindus, vėlesniuose straipsnio skyriuose taip pat aptarsime paprastą bepiločio orlaivio grandinę, kuri galėtų būti naudojama skrendant mažu drono mazgu, neatsižvelgiant į sudėtingus mikrovaldiklius.
Kvadrokopteris yra bene paprasčiausias skraidymo aparatas, reikalaujantis minimalaus aerodinaminio tikslumo ir komplikacijų, todėl nenuostabu, kad jis gali sulaukti didžiulio populiarumo tarp įvairių mėgėjų, kurie galėtų sėkmingai tai sukurti ... mašina, kuria jie iš tikrųjų galėtų skristi ir kontroliuoti savo noru.
Quadcopter dinamika
Tai, kad kvadrokopterio dronas yra paprasčiausias techniniu ir dinaminiu požiūriu, iš tikrųjų lemia 4 sraigtų dalyvavimas ir subalansuota rėmo konstrukcija, leidžianti mašinai skristi santykinai gerai esant pusiausvyrai net ir sunkiomis klimato sąlygomis.
Tačiau paprastumas taip pat reiškia, kad sistema gali būti ne tokia efektyvi, kaip įprasti lėktuvų ir smulkintuvų modeliai, kurie yra sudėtingai suprojektuoti taip, kad būtų ypač efektyvūs greičio ir degalų sąnaudų atžvilgiu, ir, žinoma, apkrovos gebėjimai ... visa tai galėtų būti iš esmės trūksta tipiškos kvadrokopterio sistemos.
Nepaisant to, kalbant apie pomėgių projektą, ši mašina tampa idealiu pasirinkimu daugumai entuziastų, kuriems labai smagu ir intriguoja namuose sukurti savo skraidymo mašiną, kuri galiausiai „klausosi“ ir skrenda bet kuria kryptimi. vartotojas nori, kad jis judėtų.
Tačiau naujam žaidėjui, kuris gali būti techniškai nepakankamai informuotas, netgi šią paprastą mašiną suprasti gali būti labai sudėtinga vien todėl, kad daugelyje susijusių informacijos, pateikiamos daugelyje svetainių, nesugebama aiškiai ir „kalba“ aptarti šios sąvokos. gali tikti pasauliečiui.
Šis straipsnis buvo specialiai parašytas tiems nelabai techniškiems žmonėms, kuriems įdomu sukurti puikų skraidymo aparatą, tačiau temą per sunku virškinti.
Kodėl „Quadcopter“ yra taip lengva statyti šiandien
Ar kada susimąstėte, kodėl keturračius ir dronus šiandieniniame pasaulyje taip lengva sukonstruoti ir ko anksčiau buvo neįmanoma naudoti naudojant elektrą?
Iš esmės tai yra dėl ličio jonų baterijų kūrimo ir patobulinimo. Tai yra ypač efektyvios baterijos, kurias šiandien galima įsigyti, pasižyminčios įspūdingu galios ir svorio santykiu. Be to, BLDC variklių ir labai rafinuotų nuolatinio magneto variklių išradimas taip pat prisidėjo prie to, kad dronus būtų lengva sukonstruoti.
Ličio jonų akumuliatorius gali užtikrinti nuostabų variklių sukimosi momentą, kurio pakanka, kad kvadrokopterio įrenginys per kelias sekundes nustumtų aukštą aukštį virš žemės, taip pat leidžia ilgą laiką likti ore. spektaklis labai efektyvus ir naudingas.
Kaip skrenda kvadrokopteris
Dabar pereikime teisingai ir supraskime, ko reikia norint, kad kvadrokopteris sėkmingai skristų. Štai pagrindai, kad mašina sklandžiai skristų:


1) Iš esmės mašinai reikalingas tvirtas ir tvirtas kūnas, tačiau ypač lengvas. Tai galima pagaminti arba surinkti naudojant tuščiavidurius kvadratinius aliuminio ekstruzijos vamzdžius, tinkamai gręžiant skylutes ir tvirtinant rėmą veržlėmis ir varžtais.
2) Konstrukcija turėtų būti tobulo „+“ arba „x“ formos, ji neturi skirtumo, jei kampas tarp „kertančių“ vamzdžių yra 90 laipsnių.

Pagrindinius elementus, reikalingus kvadrokopterio statybai, galima pamatyti šiame paveikslėlyje:

Dalies surinkimo modeliavimas
Žemiau pateiktas apytikslis animacinis modeliavimas parodo, kaip surinkti aukščiau pateiktus elementus kartu:

Kaip sukonstruoti „Quadcopter Framework“
„+“ Rėmo aliuminį galima įsigyti tinkamai supjaustžius ir parenkant paruoštus aliuminio ekstruzijos vamzdžius, kaip parodyta žemiau:

Rėmo dydis yra santykinis ir todėl nėra labai svarbus. Galite pastatyti platų rėmą su varikliais, išdėstytais toli vienas nuo kito, arba pastatyti gana kompaktišką rėmo konstrukciją ten, kur varikliai nėra per toli ... nors būtina užtikrinti, kad sraigtai yra gerai nutolę vienas nuo kito, kad būtų užtikrinta geresnė pusiausvyra ir pusiausvyra.
3) „+“ rėmo konstrukcija turi būti su kvadratine platforma centrinėje dalyje, kur rėmo rankos susitinka ir kerta viena kitą. Tai gali būti tiesiog gerai poliruota aliuminio plokštė, tinkamai pritaikyta matmenims, kad būtų galima patogiai sutalpinti visą reikalingą elektroniką ir laidus.
Taigi ši centrinė plokštė arba platforma iš esmės reikalinga norint įdiegti ir patalpinti sistemos elektroniką, kuri galiausiai būtų atsakinga už jūsų kvadrokopterio valdymą.
4) Užbaigus pirmiau pateiktą konstrukciją, varikliai turi būti pritvirtinti skersinių strypų galuose, kaip parodyta aukščiau esančiuose paveiksluose.
5) Nereikia nė sakyti, kad visi montavimo darbai turi būti atliekami labai tiksliai ir tobulai sulygiuojant, todėl tam darbui gali prireikti patyrusio gamintojo.
Kadangi viskas projekte yra poromis, tiksliai sulyginti elementus nebus per sunku, tai tik porų dydžio nustatymas ir pritaikymas kuo didesniu panašumu, o tai savo ruožtu užtikrins maksimalų pusiausvyros, pusiausvyros ir sinchronizavimo lygį sistemai.
Sukūrus karkasą, laikas integruoti elektronines grandines su atitinkamais varikliais. Tai reikės atlikti pagal nurodymus, pateiktus pateiktame grandinės vadove.
Plokštės gali būti sumontuotos apatinėje centrinės plokštės pusėje su atitinkamu korpusu arba virš plokštės, vėlgi su atitinkama spintele, kad ji būtų sandariai uždaryta.

Sraigtų sukimosi krypties supratimas
Analizuojant variklio sraigtų sukimosi kryptį subalansuotam pakėlimui:
Remiantis aukščiau pateiktu animuotu modeliavimu, variklio sraigtų sukimosi kryptis turėtų būti sureguliuota taip:
Jis tiesiog turi būti toks, kad vieno strypo galuose esantys varikliai būtų identiški, bet skirtingi nuo kitos strypo variklio krypties, ty jei vieno strypo varikliai sukasi pagal laikrodžio rodyklę, tada kito galo varikliai strypas turi būti sureguliuotas, kad suktųsi prieš laikrodžio rodyklę. kryptis.
Norėdami teisingai suprasti priešingą variklių judėjimą, kurio gali prireikti priskirti varikliams, kad būtų užtikrintas subalansuotas
Kaip valdyti kvadrokopterio kryptį valdant variklių greitį.
Taip, kvadrokopterio skrydžio kryptį galima pakoreguoti ir valdyti pagal jūsų pačių norus ir valią, atitinkamiems varikliams paprasčiausiai pritaikius skirtingą greitį (RPM).
Šie paveikslėliai parodo, kaip bazinis greičio perdavimas gali būti pritaikytas atitinkamiems varikliams, norint pasiekti ir įvykdyti bet kokią norimą mašinos kryptį:




Kaip nurodyta pirmiau pateiktose diagramose, tinkamai sumažinant variklių rinkinio greitį arba padidinant priešingo variklių rinkinio greitį arba pakoreguojant greičius pagal savo pačių pageidavimus, kvadrokopterį galima priversti važiuoti oru bet kokiu greičiu. norima konkreti kryptis.
Aukščiau pateikti vaizdai nurodo pagrindines kryptis, tokias kaip pirmyn, atgal, dešinėn, kairėn ir pan., Tačiau bet kuri kita nelyginė kryptis taip pat gali būti veiksmingai įgyvendinta tinkamai sureguliuojant atitinkamų variklių greitį arba tai gali būti tik vienas variklis.
Pavyzdžiui, norint priversti mašiną skristi į šiaurės / krypties kryptį, gali būti padidintas tik S / E variklio greitis, o kad mašina galėtų skristi šiaurės ir vakarų kryptimi - S / E greitis. W variklis gali būti padidintas ... ir pan. Tai tiesiog reikia praktikuoti, kol vartotojas galės pasiekti ir valdyti visišką kvadrokopterio valdymą.
Suprojektuoti praktišką kvadrokopterį
Iki šiol sužinojome apie pagrindinę drono korpuso ir aparatūros konstrukciją, dabar sužinokime, kaip greitai ir pigiai pagaminti kvadrokopterį ar drono grandinę naudojant labai įprastus komponentus. Viename iš mano ankstesnių pranešimų mes sužinojome, kaip padaryti gana sudėtingą ir todėl efektyvų keturračių lėktuvų skraidymo aparatą nenaudojant mikrovaldiklio. Norėdami gauti daugiau informacijos, norėtumėte pereiti šiuos įrašus:
Nuotolinio valdymo grandinė be MCU Elektroninė grandinė
Šiame straipsnyje mes stengiamės supaprastinti pirmiau pateiktą dizainą, pašalindami variklius be šepetėlių ir pakeisdami jį šepečiais varikliais, todėl leisime atsikratyti komplekso BLDC tvarkyklės grandinės modulis .
Kadangi quadcopter mechaninės konstrukcijos detalės jau išsamiai aptartos aukščiau, mes aptarsime tik grandinės projektavimo skyrių ir sužinosime, kaip jis gali būti pastatytas skraidant siūlomą paprasčiausią bepiločio orlaivio grandinę.
Kaip minėta anksčiau, šiam paprastam kvadrokopteriui reikalingi tik pagrindiniai RF nuotolinio valdymo moduliai, kaip parodyta toliau pateiktame paveikslėlyje:

Jums reikės nusipirkite šiuos RF modulius iš bet kurios internetinės parduotuvės arba iš vietinio elektroninių atsarginių prekių pardavėjo:
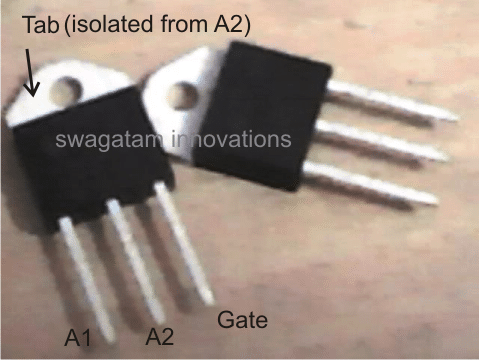
Be aukščiau paminėtų RF pultelių moduliai Taip pat reikės 4 nuolatinio magneto šlifuotų variklių, kurie iš tikrųjų sudaro drono mašinos širdį. Tai gali būti tokia, kaip nurodyta šiame paveikslėlyje su pateiktais aprašymais, arba bet kokia kita, kaip nurodyta reikalaujamose vartotojo specifikacijose:

Elektrinės variklio specifikacijos:
- 6V = darbinė įtampa (piko 12V)
- 200mA = darbinė srovė
- 10 000 = RPM
Dalių sąrašas
- 1K, 10K 1/4 vatų = po 1
- 1uF / 25V kondensatorius = 1nr
- Iš anksto nustatytas 10K arba 5K = 1no
- Rx = 5 vatų vielinis rezistorius, vertė turi būti patvirtinta eksperimentais.
- IC 555 = 1 Nr
- 1N4148 Diodai = 2nos
- IRF9540 Mosfet = 1no
- 6V variklio šepečiu tipas = 4nos
- Lankstūs laidai, lydmetalis, srautas ir kt.
- Bendrosios paskirties PCB minėtoms dalims surinkti
- 4 kanalų RF nuotolinio valdymo modulis, kaip parodyta atitinkamuose vaizduose.
- Aliuminio kanalai, sraigtai, veržlės, plokštės ir tt, kaip paaiškinta straipsnyje.
- Baterija, kaip parodyta žemiau:

Kaip sukonfigūruoti nuotolinio valdymo imtuvą varikliais
Prieš suprantant, kaip konfigūruoti nuotolinio valdymo imtuvą su kvadrokopterio varikliais, būtų svarbu sužinoti, kaip manoma, kad variklio greitis turi būti sureguliuotas ar išlygintas, kad būtų generuojami reikalingi judesiai kairėn, dešinėn, pirmyn, atgal.
Pirmiausia yra du būdai, leidžiantys judėti kvadrokopteriui, kurie yra „+“ ir „x“ režimuose. Savo dizainui mes naudojame pagrindinį „+“ drono judėjimo režimą, kaip nurodyta šioje diagramoje:

Remdamiesi aukščiau pateikta schema suprantame, kad tiesiog reikia tinkamai padidinti atitinkamų variklių greitį, kad galėtume atlikti norimus drono krypties manevrus.
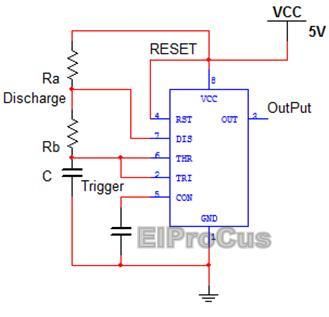
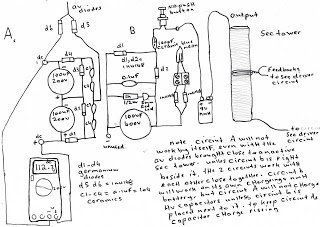
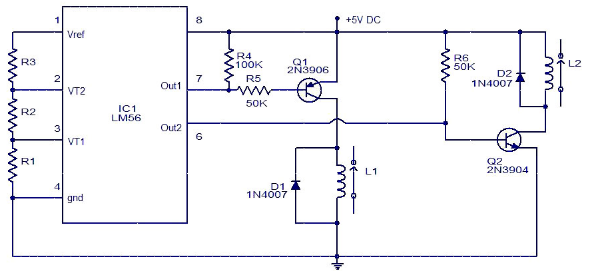
Šį greičio padidėjimą galima įgyvendinti sukonfigūravus nuotolinio valdymo reles pagal šią elektros instaliacijos schemą. Žemiau esančioje diagramoje galime pamatyti IC 555 PWM grandinė laidinis su 6 relių nuotolinio valdymo imtuvo modulio 4 relėmis (1 relė yra nenaudojama ir gali būti paprasčiausiai nuimama, kad atsirastų vietos ir svorio).
PWM reguliavimas
Kaip matyti iš diagramos, PWM tiekimas yra sujungtas su visais relių N / C kontaktais, o tai reiškia, kad paprastai kvadrokopteris sklando per šį vienodą ir vienodą PWM tiekimą, kurio darbo ciklą iš pradžių galima sureguliuoti taip, kad kvadrokopteris gali pasiekti teisingą nurodytą traukos ir aukščio kiekį.
Tai galima eksperimentuoti tinkamai sureguliuojant rodomą PWM puodą.
Kaip konfigūruoti relės kontaktus
Relių N / O kontaktai gali būti matomi tiesiogiai prijungti prie teigiamo maitinimo šaltinio, todėl kiekvieną kartą, kai nuotolinio siųstuvo ragelyje paspaudžiamas atitinkamas mygtukas, imtuvo modulyje įjungiama atitinkama relė, kuri savo ruožtu leidžia atitinkamam varikliui gauti visą 12 V maitinimą iš akumuliatoriaus.
Pirmiau nurodyta operacija leidžia įjungtam varikliui įgyti didesnį greitį nei likusiems varikliams, o tai leidžia kvadrokopteriui judėti nurodytos krypties link.
Kai tik atleidžiamas nuotolinio valdymo mygtukas, dronas akimirksniu sustoja ir toliau sklando pastoviu režimu.
Kitus kryptinius judesius galima pasiekti paspaudus kitus nuotolinio telefono ragelius.
Aukščiausia relė skirta saugiam mašinos nusileidimui užtikrinti. Tai daroma pridedant srovės kritimo varžą nuosekliai su parodytos relės N / O kontaktu.
Ši rezistoriaus vertė turi būti apskaičiuojama atliekant tam tikrus eksperimentus, kad kvadrokopteris pakiltų aplink porą pėdų virš žemės, kai tik šis rezistorius perjungiamas per prijungtą relę.
Grandinės schema

Rodomos relės yra RF modulio imtuvo dalis, kurios kontaktai iš pradžių nėra prijungti (pagal numatytuosius nustatymus tušti) ir juos reikia prijungti, kaip nurodyta aukščiau pateiktoje diagramoje.
RF nuotolinis imtuvas turėtų būti sumontuotas kvadrokopterio viduje, o jo relės prijungtos prie atitinkamų variklių ir akumuliatoriaus, kaip parodyta aukščiau.
Galite pamatyti keletą jungčių (žalios spalvos), kurios be reikalo gali padidinti drono svorį. Galite juos visus pašalinti, kad sumažintumėte svorį, ir lituodami tiesiogiai prijunkite atitinkamus laidus prie PCB.
Kaip dronas juda:
Kaip paaiškinta pirmiau pateiktoje diskusijoje, paspaudus konkretų nuotolinio valdymo mygtuką, jis įjungia atitinkamą kvadrokopterio modulio relę, todėl atitinkamas variklis juda greičiau.
Ši operacija savo ruožtu verčia mašiną judėti priešinga varikliui, kuris yra įjungtas, sukimosi greičiu greičiu.
Pavyzdžiui, padidinus pietinio variklio greitį mašina juda link šiaurės, padidindama šiaurinį variklį - į pietus, panašiai padidinus rytinį variklio greitį, ji juda į vakarus ir atvirkščiai.
Įdomu tai, kad padidinus pietų / rytų variklius, kvadrokopteris juda link priešingo šiaurės / vakarų, kuris yra įstrižainės režimu .... ir pan.
Argumentai už ir prieš minėtą paaiškinimą „Simple Qaudcopter“ nuotolinio valdymo grandinėje.
Argumentai 'už'
- Pigūs ir lengvai pastatomi net palyginti naujo mėgėjo.
- Nereikia sudėtingų vairasvirtės operacijų.
- Galima valdyti naudojant vieno 6 kanalų nuotolinio valdymo modulį
Minusai
- Mažiau efektyvus akumuliatoriaus atsarginis elementas dėl šepetėlių variklių
- Kryptinis greitis yra pastovus ir jo negalima keisti per nuotolinio valdymo ragelį
- Manevravimas gali būti ne lygus, o šiek tiek trūkčiojantis, kai perjungiate mygtukus.
Pora: Jėgos jutimo rezistorius paaiškintas Kitas: talpiosios įtampos daliklis