Šiame įraše mes ištiriame, kas yra BLDC variklis, ir vėliau sužinome apie be jutiklio BLDC variklio tvarkyklės konstrukciją.
BLDC procesoriaus ventiliatoriai
Matėte tuos sparčiai judančius ventiliatorius procesoriuose, įtampos stabilizatoriuose, DVD grotuvuose ir kitoje panašioje įrangoje, kurie dirba maksimaliai efektyviai, sunaudoja mažiausią erdvę, srovę ir vis dėlto sugeba atlikti svarbias operacijas, kaip numatyta konkrečioje įrangoje?
Taip, tai visos šiuolaikinės BLDC ventiliatorių arba bešepetėlių nuolatinės srovės variklių versijos, kurios yra daug pranašesnės už senus tradicinius šepečiu variklius.

Vaizdo malonumas: https://en.wikipedia.org/wiki/Computer_fan#/media/File:Geh%C3%A4usel%C3%BCfter.jpg
Tačiau BLDC varikliui reikės sudėtingos tvarkyklės grandinės, ir taip, visuose šiuose procesoriaus ventiliatoriuose yra įmontuoti šie tvarkyklių moduliai, nors jie atrodo lengvai valdomi naudojant įprastą nuolatinę nuolatinę srovę. Viduje sistemoje jau yra sumanioji grandinė.
BLDC variklio tvarkyklė
Čia sužinosime apie vieną tokią išmanią BLDC variklio tvarkyklę, naudojant vieną mikroschemą DRV10963 bet kokiam mažam BLDC varikliui su neįtikėtinu efektyvumu vairuoti, o vėliau viename iš būsimų straipsnių pamatysime, kaip ši IC grandinė gali būti patobulinta važiuojant net tokius galingus didelės srovės BLDC, kokie yra naudojamas keturračiuose.
Bet prieš tai būtų įdomu šiek tiek sužinoti apie BLDC variklius.
Skirtumas tarp šepetėlių ir bešepetinių nuolatinės srovės variklių
Skirtumas tarp šepečiu variklio ir variklio be šepetėlio ir efektyvumo rodiklis yra gana akivaizdus.
Kadangi šlifuotų variklių žaizdos armatūra pati juda tarp magnetų, jie turi naudoti „šepetėlius“ (trinančius kontaktus), kad judantys ritės gnybtai galėtų nuolat priimti maitinimo įtampą patys nepasiekdami tiekimo šaltinio, o tai priešingu atveju dirbti neįmanoma ir pakenkti operacijoms.
Varikliuose be šepetėlių ritė ar apvija niekada nejuda ir yra pastovi, čia rotorius neša nuolatinių magnetų rinkinį ir sukasi veikdamas aplinkinių apvijų magnetinius srautus.
Kadangi magnete nėra jokių rūpesčių ir jis gali dirbti be terminalų valdymui ar energijos gavimui, jis gali dirbti be vargo, sukdamasis sparčiu greičiu ir beveik be triukšmo.
Bet čia yra laimikis. Norint priversti elektromagnetą reaguoti į nuolatinio magneto srautus, reikia nuolat keisti magnetinę fazę ar polius, kad abu partneriai galėtų nuolat reaguoti ir pereiti priešingą jėgą, taip atlaisvindami reikiamą sukimo jėgą. rotorių ir atlikite sukimąsi su gautu sukimo momentu.
Šepečiu varikliu tai tampa lengviau dėl savaime sureguliuojamos armatūros ritės, kuri gali suktis ir sukurti savaime išsilaikančią priešingą magnetinę jėgą ir toliau besisukanti be jokių išorinių impulsų ar apdorojimo.
Tačiau BLDC tai tampa problema, nes magneto rotorius lieka „bejėgis“ ir jam reikia apskaičiuotos magnetinės komandos iš apvijos, kad jis pasisuktų prasmingai, o ne atsitiktinai.
Būtent todėl visiems BLDC varikliams, norint valdyti tris skirtingus variklio rinkinius, privaloma variklio vairuotojo grandinė.
Taigi visi BLDC iš esmės yra trifaziai varikliai, kuriems rotoriaus sukimo momentui sukurti reikia 3 fazių.
Ką veikia „Sensorless BLDC“ tvarkyklės
Jutiklis, turintis mažiau BLDC tvarkyklės grandinės, iš eilės elektrifikuoja 3 apvijų rinkinius taip, kad magnetinis rotorius galėtų išgyventi pastovią priešingą jėgą, leidžiančią varikliui pasiekti ilgalaikį sukimo momentą ir sukimosi jėgą.
Tačiau šis nuoseklus BLDC apvijos maitinimas grandine negali būti nustatytas tik atsitiktinai, jis turi būti tandemas arba kaip atsakas į rotoriaus magneto sukimosi padėtį, kitaip įgyvendinimas gali būti netinkamas ir mes galime būti variklio ašies (rotoriaus) liudininkai. ) sukasi atsitiktinai, tai yra trūkčiojimas tarp laikrodžio rodyklės ir prieš laikrodžio rodyklę be jokio protingo pasukimo.
Kodėl jutikliai naudojami BLDC varikliuose
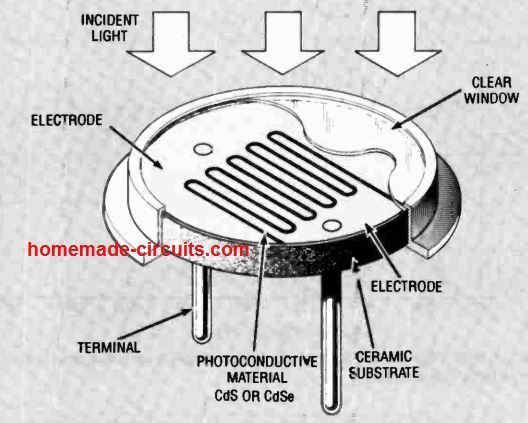
Todėl mes pristatome jutiklius, išdėstytus daugelyje BLDC variklių variantų, šie jutikliai (paprastai „Hall“ efekto jutikliai) „supranta“ rotoriaus magneto magnetinių polių kintančią padėtį, nurodome prijungtą procesoriaus grandinę elektrifikuoti atitinkamą apviją ir atlikti sukamąjį judesį su optimaliu sukimo momentu.
„Hall“ efekto jutikliai efektyviai naudojami daugumoje BLDC variklių, kurie yra santykinai didesnio dydžio, tačiau mažesniems varikliams, pvz., Procesoriaus ventiliatoriams, procesoriaus įrenginiams, DVD grotuvams, mažiems išmetimo ventiliatoriams, keturračiuose įrengtuose varikliuose „Hall“ efekto jutikliai gali tapti netinkami ir todėl įgyvendinamas alternatyvus jutiklis be požiūrio.
Tai reiškia, kad reikia panaudoti apvijai būdingą atgalinę EML elektrą, kuri laikoma etaloniniu šaltiniu apdorojant ir elektrifikuojant atitinkamus apvijų rinkinius ir vykdant sukimo momentą.

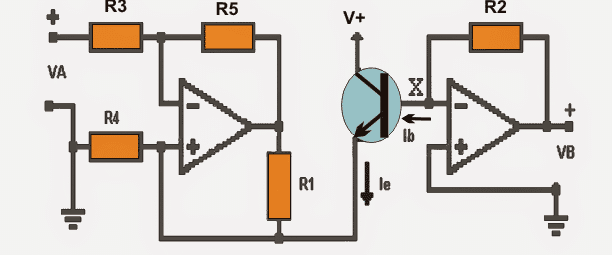
Modeliuojant BLDC rotoriaus judesį
Pirmiau pateiktoje neapdorotoje simuliacijoje galime vizualizuoti, kaip išlaisvintas atgalinis EMF yra laikomas atskaitos tašku ir naudojamas sekančių impulsų kūrimui vėlesniems apvijų rinkiniams, nustatant sukamąjį sukimo momentą centriniam nuolatinio magneto rotoriui. Gali būti, kad modeliavimas nėra tikslus replikavimas, tačiau jis pateikia apytikslį supratimą apie darbo principą.
Įdomu pažymėti, kad impulsas perjungiamas, kai magneto N / S yra tiksliai apvijos šerdies centre, o tai leidžia apvijai įsijungti kaip N arba S, priklausomai nuo impulso poliškumo, ir pritraukti ir atstumti jėga magnetams N / S, tokiu būdu sukuriant reikiamą sukimo momentą maksimaliu įmanomu lygiu.
Tai savo ruožtu tampa įmanoma dėl galinio EML, išleisto perjungiant ankstesnę apviją.
Pirmiau pateiktoje diskusijoje paaiškinamas jutiklio, turinčio mažiau BLDC variklio, darbas. Dabar sužinokime, kaip nurodyta grandinė tvarko pirmiau minėtą sudėtingą 3 fazių perjungimo vykdymą
BLDC tvarkyklė DRV10963
Po šiek tiek „Google“ paieškos radau šią be jutiklių BLDC tvarkyklės grandinę, naudojančią vieną mikroschemą DRV10963, kuri naudoja nereikšmingą dalių kiekį konfigūracijoje ir vis dėlto sugeba įgyvendinti sudėtingą numatytų veiksmų apdorojimą.
„DRV10963“ yra pažangiausias lustas, specialiai sukurtas valdyti mažiau jutiklių turinčius BLDC variklius, tik numatant galinę EMF iš variklio apvijos ir tiksliai nurodant vyniojimą bei užtikrinant optimalų rotoriaus sukimo momentą.
Grandinės schema

Aukščiau pateiktame paveikslėlyje parodytas paprastas grandinės išdėstymas, kuris, matyt, apima tik patį IC.
Įvairūs kontaktai skirti tam tikroms funkcijoms atlikti, tokioms kaip variklio PWM greičio valdymas, krypties valdymas ir kt., Paprasčiausiai paduodant atitinkamus kontaktus nurodytomis išorinio šaltinio duomenimis.
Šiame paveikslėlyje parodytas lusto paketas, kuris atrodo kaip 10 kontaktų DIL IC. Įvairias tų pačių elementų funkcijas galima ištirti iš diagramoje pateiktų duomenų:

Remiantis siūlomos be jutiklių BLDC tvarkyklės grandinės schema kaip pateikta ankstesniame straipsnyje, taip pat aukščiau pateiktą lusto vaizdą, išsamią informaciją galima suprasti taip:
Išsami informacija apie IC kištuką
FG = tai yra variklio greičio indikatoriaus kaištis (išėjimas), kuris sukabintas atviro kolektoriaus režimu su vidiniu BJT.
Atviras kolektorius reiškia, kad išvesties rezultatas šiame kontakte sukels neigiamą PWM, grimzdamas logiką per atvirą kolektorių ir žemę, taigi, norėdamas gauti galiojantį rodmenį, vartotojas turės prijungti traukimo rezistorių per šį atvirą kolektorių ir teigiamą maitinimą (5 V ), kad būtų galima atlikti greičio rodymą šiame kniebtuve.
FGS = Tai greičio indikatoriaus parinkiklio įvestis, tai reiškia, kad čia galima įvesti aukštą arba žemą logiką, norint įjungti / išjungti indikatoriaus kaištį FG.
Vcc = teigiamas maitinimo šaltinio maitinimas, kad jis galėtų veikti, neturi viršyti 5 V.
W, U ir V yra 3 fazių išėjimai BLDC varikliui, kuris turėtų būti valdomas per šį IC. Tai taip pat veikia kaip įėjimai, kad būtų galima nustatyti variklio EMF impulsus reikalingam sinchronizuotam variklio ritinių perjungimui.
GND = nurodo neigiamą IC maitinimo įtampą Vdd kaiščio atžvilgiu.
FR = Padeda pasirinkti ar komanduoti variklio kryptį ir gali būti dinamiškai keičiamas bet kuriuo metu, kai tik sistema įjungiama, paprasčiausiai įvedant išorinę logiką aukštą arba žemą.
PWM = Tai reiškia PWM valdymo įvestį iš išorinis PWM bangos formos generatorius.
Ši PWM įvestis gali būti kintama norint pasiekti norimą prijungto BLDC variklio greičio valdymą.
Punktyrinis lusto centre esantis taškas rodo terminį įklotą, kurį galima spausti arba spausti radiatoriumi, kad būtų galima nuskandinti galimą lusto šilumą, kol ji naudojama su pakrautu BLDC varikliu.
Pirmiau pateiktoje diskusijoje nurodoma BLDC jutiklio neturinčio BLDC variklio tvarkyklės DRV10963 prijungimo informacija arba prijungimo duomenys. Dabar išsamiai išanalizuokime vidinę lusto konfigūraciją ir veikimą naudodamiesi šiais punktais:
Įrenginio aprašymas
DRV10963 yra 3 fazių be jutiklių elektrinių variklių operatorius su įmontuotais maitinimo MOSFET (3 fazių H tiltais). Jis pritaikytas didesniam produktyvumui, mažesniam triukšmui ir minimaliam antrinių medžiagų skaičiaus variklio pavaros funkcijoms. Išskirtinė be jutiklių lango „Iess 180 °“ sinusoidinė valdymo schema užtikrina be triukšmo variklio važiavimo efektyvumą.
„DRV10963“ sudaro išmaniojo užrakto aptikimo funkcija, sujungta su papildomomis įmontuotomis saugos grandinėmis, kad būtų užtikrintas saugus veikimas. DRV10963 galima rasti termiškai efektyvioje 10 kontaktų USON pakuotėje su neuždengtu terminiu kilimėliu.
Kaip veikia IC
DRV10963 produktas yra 3 fazių be jutiklių variklio operatorius, turintis įleidžiamos galios MOSFET
sukurtas specialiai geresniam našumui, sumažintam rezonansui ir minimaliam paviršinių dalių skaičiavimui.
Pagrindinis be langų be langų 180 ° sinusoidinis valdymo planas rodo triukšmo neturintį variklį, išlaikant nominalųjį elektros stimuliuojamo sukimo momento bangavimą. Inicijavus įrenginį DRV10963, variklis pasuks per FR įvesties kaištį nurodytu kursu.
DRV10963 lustas veiks 3 fazių BLDC varikliui, naudodamas sinusinį valdymo planą.
Panaudotų sinusinių fazių įtampų reikšmė priklauso nuo PWM kaiščio darbo ciklo. Kol variklis juda, DRV10963 IC pateikia greičio duomenis ties FG kaiščiu.
DRV10963 įrenginį sudaro išmani užrakto jutimo funkcija. Tokiu atveju, kai variklis yra sustabdytas pašalinio slėgio, programa nustatys fiksavimo problemą ir imsis priemonių apsaugoti pati kartu su varikliu.
Konkreti užrakto jutimo grandinės procedūra išsamiai aprašyta užrakto aptikime. Be to, DRV10963 IC apima kelias įmontuotas saugos grandines, pavyzdžiui, apsaugą nuo srovės, viršįtampio apsaugą, apsaugą nuo įtampos ir apsaugą nuo temperatūros.
Būdingas paaiškinimas
Greičio įvestis ir valdymas
DRV10963 pateikia 3 fazių 25-kl-lz PWM išėjimus, kuriuose gali būti standartinė sinusinių bangų formų procentinė dalis nuo fazės iki fazės. Jei koks nors ciklas nustatomas atsižvelgiant į žemę, greičiausiai aptikta bangos forma yra PWM apsaugotas sinusoidas kartu su 3 laipsnio harmonikomis, kaip parodyta 2 paveiksle.

Ši kodavimo strategija supaprastina tvarkyklės specifikacijas dėl tos priežasties, kad tikriausiai dažnai bus vienos fazės išvestis, kuri galėtų būti lygi nuliui.
Rezultato amplitudė skiriasi priklausomai nuo maitinimo įtampos (VCC) ir nustatyto PWM darbo ciklo (PWM), kaip apibrėžta 1 lygtyje ir paryškinta 3 paveiksle. Optimali amplitudė įgyvendinama, kai nurodomas PWM darbo ciklas yra 100 PERCENT.
Vphpk = PWMdc>

Variklio greitis nėra tiesiogiai reguliuojamas naudojant PWM, siekiant reguliuoti varikliui naudojamų fazių įtampų amplitudę.
PWM įvesties veikimo ciklas modifikuojamas į 9 bitų skaitmeninį dydį (nuo 0 iki 511).
Reguliavimo skiriamoji geba yra 1/512 == 0,2%. Darbo ciklo analizatorius palengvina pradinio užsakymo keitimo operaciją tarp įvesties darbo ciklo ir 9 bitų skaitmeninės figūros.
Tai pabrėžiama 4 paveiksle, kuriame r = 80 ms.

Keitimo efektyvumas tarp PWM užsakyto darbo ciklo ir maksimalios išėjimo amplitudės kinta DRV10963 įrenginyje.
Rezultato didžiausia amplitudė aptariama 1 lygtimi, kai PWM komanda> minimalus veikimo ciklas. Mažiausias veikimo ciklas dažnai nustatomas iki 13%, 10%, 5% arba be jokių apribojimų nustatant OTP (MINOP_DC1: 0).
1 lentelėje parodytos rekomenduojamos minimalaus darbo ciklo konfigūracijos.
Kai PWM nurodytas darbo ciklas yra mažesnis nei žemiausias veikimo ciklas ir didesnis nei 1,5%, išeitis bus reguliuojama minimaliu veikimo ciklu. Bet kuriuo metu, kai įvesties darbo ciklas nesiekia 1,5%, įrenginys DRV10963 greičiausiai neveiks išvesties ir bus siunčiamas į budėjimo režimą.
Tai galima iliustruoti 6 paveiksle.

Sukimosi konfigūracijos
DRV10963 užves variklį technika, kuri išsamiai aprašyta 7 paveiksle.

Variklio inicijavimo grafikas susideda iš prietaiso konfigūruojamų alternatyvų, skirtų atviros kilpos uždarymo ciklo perjungimo ribai (HOW.), Išlyginimo laikui (TAHQH) ir greitėjimo greičiui (RACE).
Norėdami susieti rotorių su komutacijos logika, DRV10963 vykdo x% darbo ciklą V ir W fazėse tuo pačiu metu kontroliuodamas U fazę GND.
Šis scenarijus tęsiasi TAIign sekundes. X% reikšmę identifikuoja VCC įtampa (kaip parodyta 2 lentelėje), kad būtų išlaikytas didelis sukimo momentas esant įvairioms maitinimo įtampoms.
Vykdant išlyginimo seką, variklis priverstas įsibėgėti, įjungdamas sinusinės fazės įtampas su didžiausiais lygiais, kaip parodyta 2 lentelėje, ir padidinant komutacijos diapazoną didėjančiu greičiu, kurį rodo RACE, kol komutacijos lygis išaugs iki Hom ., Hz.
Kai tik pasieksite šią ribą, DRV‘l0963 persijungia į uždaro ciklo režimą, kai komutacinės pavaros progresavimą atpažįsta įmontuotas valdymo algoritmas, o naudojamą įtampą atpažįsta PWM įpareigotas darbo ciklo įėjimas.
Atviro ciklo uždarymo ciklo keitimo ribą (Hom), derinimo laiką (TAHQH) ir pagreičio greitį (RACE) galima konfigūruoti naudojant OTP konfigūracijas.
Perdavimo slenksčio (KAIP) pasirinkimas paprastai patvirtinamas bandymų ir klaidų įvertinimu. Tikslas būtų teikti pirmenybę perdavimo tolerancijai, kuri galėtų būti kuo mažesnė ir suteiktų varikliui galimybę be vargo ir sąžiningai perjungti atvirojo ciklo pagreitį ir uždarojo ciklo pagreitį.
Paprastai padidinto greičio varikliams (didžiausias greitis) reikalinga didesnė perdavimo perdavimo tolerancija, nes padidinto greičio varikliuose yra sumažėjęs Kt, todėl BEMF yra prieinamesnis.
3 lentelėje parodytos konfigūruojamos perdavimo perdavimo tolerancijos nuostatos. Didžiausias greitis elektriniu Hz yra įrodytas kaip nuoroda, padedanti pasirinkti norimą perdavimo greitį konkrečiam pateikimui.

Lygiavimo laiko (TAHQH) ir greitėjimo greičio (RACE) pasirinkimas gali priklausyti nuo bandymų ir klaidų tyrimo.
Didesnės inercijos varikliams paprastai reikia ilgesnio išlyginimo laiko ir lėčiau pagreitinto greičio, priešingai nei mažos inercijos varikliams, kuriems paprastai reikalingas trumpesnis išlyginimo laikas kartu su greitesniu pagreičio procentu. Programos kompromisai turi būti įgyvendinami siekiant išnaudoti stabilumą, o ne pasukimo į viršų laikotarpį.
TI pritaria sprendimui dėl mažiau intensyvių konfigūracijų (lėtesnės RACE ir reikšmingos Tmign), kad būtų pakenkta sukimo momento laikui palaikyti maksimalų įvykdymo lygį.
Kai tik bus patvirtinta, kad įranga sąžiningai atlieka, gali būti naudojamos ypač stiprios konfigūracijos (didesnis RACC ir mažesnis TAHQH), kad sumažėtų įsijungimo momentas ir tuo pat metu atsargiai stebima įvykdymo norma.
4 lentelėje pateikiami konfigūruojami TA'g ir RACE nustatymai.

Pateikiama likusi paaiškinimo dalis dėl šio jutiklio neturinčio BLDC IC šiame originaliame duomenų lape
Prašome nedvejodami pakomentuoti, kad sužinotumėte daugiau apie aukščiau aptartą be jutiklio BLDC variklio tvarkyklės grandinės informaciją
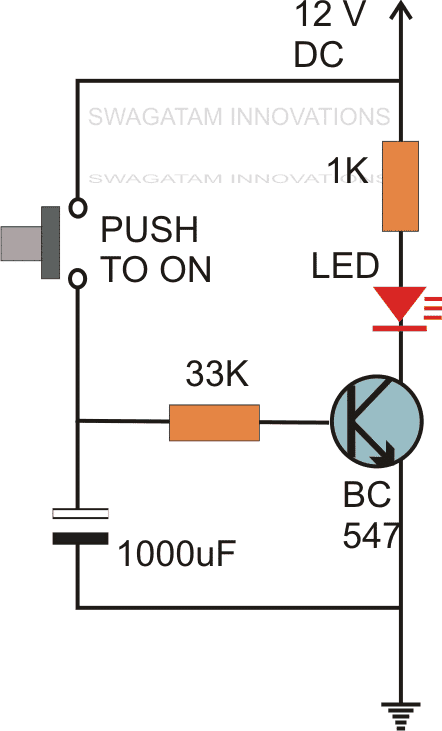
Pora: 12 V LED kuprinės maitinimo grandinė Kitas: Quadcopter nuotolinio valdymo grandinė be MCU






![Valdymo lemputės, ventiliatorius, naudojant televizoriaus nuotolinio valdymo pultą [Visa grandinės schema]](https://electronics.jf-parede.pt/img/3-phase-power/43/control-lights-fan-using-tv-remote-full-circuit-diagram-1.jpg)