Pasirinkimo ir padėjimo robotas yra tas, kuris naudojamas paimti daiktą ir pastatyti jį į norimą vietą. Tai gali būti cilindro formos robotas, užtikrinantis judėjimą horizontaliomis, vertikaliomis ir sukamosiomis ašimis, sferinis robotas, užtikrinantis du sukamuosius ir vieną tiesinį judesį, šarnyrinis robotas arba robotas (fiksuoti robotai su 3 vertikalių ašių sukamosiomis rankomis).
Privalumai
Prieš judėdami toliau, pažiūrėkime keletą priežasčių, kodėl pirmenybė teikiama robotams pasirinkti ir pastatyti:
- Jie yra greitesni ir gali atlikti darbą per kelias sekundes, palyginti su žmonėmis.
- Jie yra lankstūs ir turi tinkamą dizainą.
- Jie yra tikslūs.
- Jie padidina darbo aplinkos saugumą ir iš tikrųjų niekada nepavargsta.
„Pick N Place“ roboto dalys

Pasirinkite robotą „N Place“
Pažiūrėkime, iš ko iš tikrųjų susideda „pick and place“ robotas:
- Roveriui : Tai yra pagrindinis roboto korpusas, susidedantis iš kelių standžių kūnų, tokių kaip cilindras ar rutulys, jungtys ir grandinės. Jis taip pat žinomas kaip manipuliatorius.
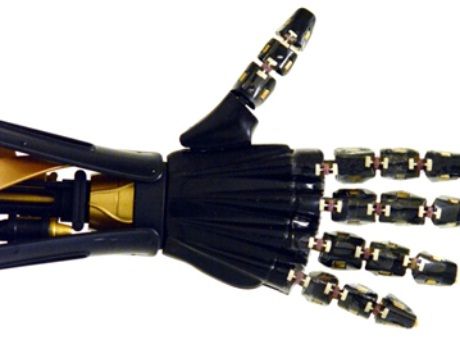
- Galinis efektorius : Tai kūnas, sujungtas su paskutiniu roverio sujungimu, naudojamas daiktams suimti ar valdyti. Tai gali būti analogija žmogaus rankai.
- Pavaros : Jie yra roboto vairuotojai. Tai iš tikrųjų suveikia robotą. Tai gali būti bet koks variklis, pavyzdžiui, servovariklis, žingsninis variklis arba pneumatiniai arba hidrauliniai cilindrai.
- Jutikliai: Jie naudojami vidinei ir išorinei būsenai pajusti, kad robotas veiktų sklandžiai. Jutikliai apima jutiklinius jutiklius, IR jutiklius ir kt.
- Valdiklis : Jis naudojamas valdyti pavaras pagal jutiklio grįžtamąjį ryšį ir tokiu būdu valdyti kiekvieno jungties judėjimą ir galų galo efektoriaus judėjimą.
Pagrindinio „Pick N Place“ roboto darbas:
Pagrindinė a funkcija išsirinkite ir padėkite robotą daroma jo jungtimis. Sąnariai yra analogiški žmogaus sąnariams ir naudojami sujungti du iš eilės esančius standžius roboto kūnus. Jie gali būti rotaciniai arba linijiniai. Norėdami pridėti jungtį prie bet kurios roboto grandies, turime žinoti apie tos kūno dalies laisvumo ir judėjimo laipsnius. Laisvės laipsniai įgyvendina tiesinį ir sukamą kūno judėjimą, o judėjimo laipsniai reiškia ašies, kurią kūnas gali judėti, skaičių.

Paprastas „Pick N Place“ robotas
Paprastą paėmimo ir padėjimo robotą sudaro du standūs kūnai ant judančio pagrindo, sujungti kartu su sukamuoju sujungimu. Sukamasis sujungimas yra tas, kuris sukasi 360 laipsnių kampu aplink bet kurią ašį.
- Dugnas arba pagrindas pritvirtinti ratais, kurie suteikia linijinį judėjimą.
- 1švstandus korpusas yra pritvirtintas ir palaiko antrą standų korpusą, prie kurio pritvirtinamas galinis efektorius.
- 2ndstandus kūnas yra judamas visomis 3 ašimis ir turi 3 laisvumo laipsnius. Jis prijungtas prie 1švkūnas su sukamuoju sąnariu.
- Galiniame efektoriuje turėtų būti visi 6 laisvės laipsniai, kad jis pasiektų visas komponento puses, kad jis užimtų padėtį bet kokiame aukštyje.
Apskritai pagrindinis robotas, kurį reikia pasirinkti ir pastatyti, veikia taip:
- Ratai, esantys po pagrindu, padeda perkelti robotą į norimą vietą.
- Standus kūnas, palaikantis galinį efektą, lenkiasi arba tiesiasi, kad pasiektų daiktą.
- Galinis efektorius tvirtai suimdamas paima daiktą ir padeda jį norimoje padėtyje.
Dabar, kai turime trumpą idėją apie „pick and place“ robotą, pagrindinis klausimas yra, kaip jis iš tikrųjų valdomas.
Paprastą „pick and place“ robotą galima valdyti valdant jo galinio efektoriaus judėjimą. Judesys gali būti hidraulinis judėjimas, t. Y. Naudojant hidraulinį skystį, veikiant robotui, esant slėgiui, arba pneumatinį judėjimą, t. Y. Naudojant suslėgtą orą mechaniniam judėjimui sukelti. Tačiau efektyviausias būdas yra naudoti variklius reikalingam judėjimui užtikrinti. Varikliai turi būti valdomi, kad robotas ir galinis efektas galėtų judėti reikiamai.
Darbinis „Pick N Place“ roboto valdymo pavyzdys
Kaip būtų valdyti robotą tik keliais mygtukais klaviatūroje? Taip, tai įmanoma! Tiesiog paspaudę reikiamą mygtuką, mes galime perduoti komandą robotui, kad jis judėtų bet kuria kryptimi, kad pasiektume savo užduotį. Be to, tai galima pasiekti naudojant paprastą belaidį ryšį.
Pažiūrėkime, kaip tai iš tikrųjų veikia:
Siųstuvo dalis susideda iš klaviatūros, sujungtos su mikrovaldikliu. Bet kurį dešimtainio formato mygtuko numerį mikrokontroleris paverčia 4 skaitmenų dvejetainiu elementu ir lygiagretus išėjimas viename iš jo prievadų pritaikomas koduotojui. Koderis konvertuoja šiuos lygiagrečius duomenis į nuoseklius duomenis ir jie tiekiami į siųstuvą, kuriame yra antena nuosekliems duomenims perduoti.

Bloko schema, kurioje parodyta „Pick N Place“ roboto siųstuvas
Imtuvo pusę sudaro dekoderis, sujungtas su mikrovaldikliu. Dekoderis konvertuoja gautą komandą nuosekliu formatu į lygiagrečią formą ir pateikia šiuos duomenis mikrovaldikliui. Remdamasis šia komanda, mikrovaldiklis siunčia atitinkamus įvesties signalus variklių vairuotojams, kad jie galėtų vairuoti atitinkamus variklius.

Bloko schema, kurioje rodomas „Pick N Place“ roboto imtuvas
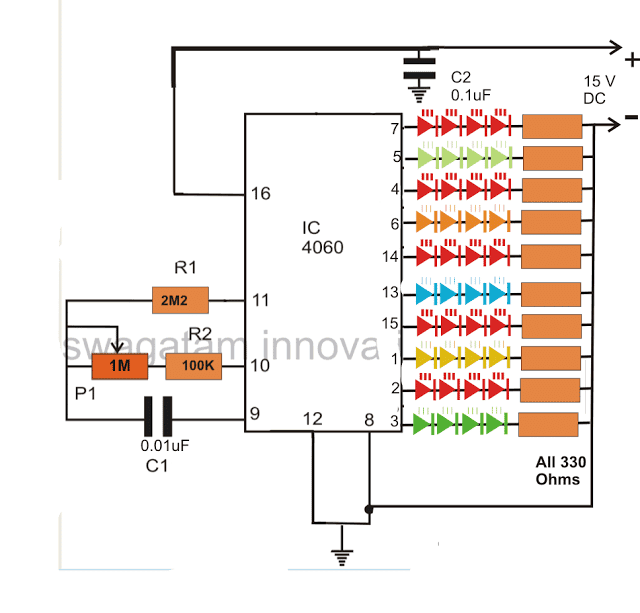
Sistema susideda iš dviejų variklių, užtikrinančių judėjimą visam robotui, ir dviejų kitų variklių, užtikrinančių rankos judėjimą. Galinį efektorių arba griebtuvą reikia valdyti, kad objektas būtų tinkamai spaudžiamas, kad jis veiksmingai su juo elgtųsi, kad jis minkštas sukibimas . Tai užtikrinama tinkamai valdant rankos variklius. Iš svirtinių variklių išvestis yra prijungta prie 10Ohms / 2W rezistoriaus, o varikliui esant per didelei apkrovai ar užblokavus, per rezistorių sukuriama aukšta įtampa, dėl kurios optoizoliatoriaus išėjime ir pertraukoje atsiranda aukštas loginis lygis. Mikrokontrolerio kaištis, prijungtas prie optoizoliatoriaus išėjimo per pnp tranzistorių, gauna logiškai žemą signalą, kuris sustabdo visas kitas griebtuvo operacijas.
Taigi, naudodamiesi paprastu RF ryšiu, mes iš tikrųjų galime valdyti išrinkimo ir padėjimo robotą.
Roboto „Pick and Place“ praktiniai pritaikymai:
- Gynybos programos : Jis gali būti naudojamas stebėjimui, taip pat kenksmingiems daiktams, pavyzdžiui, bomboms, pasiimti ir saugiai juos paskleisti.
- Pramoninės programos : Šie robotai naudojami gamyboje, norint pasiimti reikiamas dalis ir pastatyti jas teisingoje padėtyje, kad užbaigtumėte mašinos tvirtinimą. Jis taip pat gali būti naudojamas daiktams uždėti ant konvejerio juostos, taip pat pasiimti sugedusius produktus iš konvejerio juostos.
- Medicinos programos : Šie robotai gali būti naudojami atliekant įvairias chirurgines operacijas, tokias kaip sąnarių keitimo operacijos, ortopedinės ir vidinės chirurgijos operacijos. Jis atlieka operacijas tiksliau ir tiksliau.
Išskyrus šias programas, šie robotai taip pat gali būti naudojami įvairiose kitose žmonijai pritaikytose programose.
Dabar lieka klausimas - kiek toli yra diena, kai robotai visiškai palengvins kelią žmonėms?