
Į robotas yra elektromechaninė mašina tam vadovauja grandinė arba kompiuterinė programa. Robotai apsikeitė žmonėmis, kad atliktų nuolatines ir pavojingas užduotis, kurių žmonės nenori atlikti. Pateikti robotai skirstomi į skirtingas kategorijas atsižvelgiant į jų savybes ir našumą, pvz., pramoninius robotus, komercinius robotus, paslaugų robotus, mobiliuosius robotus. Tai aptarnavimo robotas, kuris atlieka nuolatines užduotis, norėdamas pasveikinti žmones rankos judesiu, vaizduojančiu „Namaste“ per įrašytą balso pranešimą. Paprastai, kai mes kviečiame žmones į namus, vakarėlius, vedybų funkcijas, biurą ir kt. Turime pasirūpinti, kad žmogus pasisveikintų ir pakviestų juos prie įėjimo. Jei žmonių yra mažai, tai užduotis yra paprastesnė. Bet jei pasveikini šimtus žmonių, tada užduotis yra sunki. Norėdami įveikti šią problemą, pateikiame projektą, būtent „namaste“ robotą su balso valdymu.

„Namaste“ robotas
„Namaste“ robotas su valdymu balsu
Pagrindinė šios Namaste koncepcija roboto projektas yra valdyti įvairius servovariklius per „Arduino“ lentą. Šis robotas nuskaito aplinkinius žmones ir pasuka galvą 180 °. Jei jis atpažįsta bet kurį netoliese esantį asmenį, jis linki tam asmeniui su Namaste abiem rankomis suspausti. Tai tradicinis būdas palinkėti žmonėms Indijoje. robotų programos įtraukti į prekybos centrus, parkus, biurus, kad pritrauktų žmones.
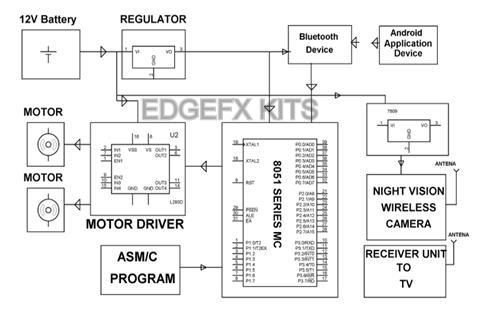
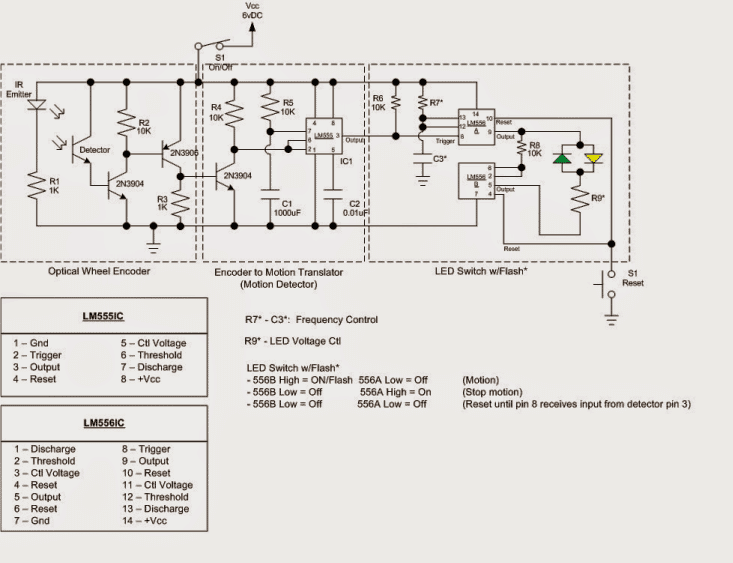
Blokuoti „Namastae“ roboto schemą su valdymu balsu
Šis paveikslėlis reiškia „Namaste“ roboto su valdomu balsu blokinę schemą. Tokio tipo robote užprogramuotos balso komandos. Prie bendro maitinimo šaltinio galima prijungti visą kūrimo plokštę. Kiekvieno bloko aprašymas yra toks. maitinimo šaltinis suteikia maitinimą visiems moduliams. Šiems moduliams reikalinga srovė mA, o darbinė įtampa bus 5 V.

Blokuoti „Namastae“ roboto schemą su valdymu balsu
„Arduino“ lenta
„Arduino“ yra vienos rūšies įrankis pagrįstas paprasta mikrovaldiklio plokšte, naudojamu fiziniam pasauliui valdyti ir suvokti nei stalinis kompiuteris. Fiziniam skaičiavimui yra įvairių mikrovaldiklių platformų. Svarbios „Arduino“ savybės yra nebrangi, atviro kodo ir išplėstinė programinė įranga. „Arduino“ programinę įrangą galima įsigyti kaip atvirojo kodo įrankį, o kalbą galima išplėsti per C ++ bibliotekas.

„Arduino“ lenta
Pingo jutiklis
Pingo jutiklis naudoja SONAR, kad valdytų šalia jo esančio objekto atstumą. Tai jutiklis naudojamas kaip roboto akys, kad pajustų kliūtį. Pavyzdžiui, artumo jutiklis. Tai suteikia puikų diapazono tikslumą ir stabilius rodmenis. Šio jutiklio veikimui neturi įtakos juoda medžiaga ar saulės spinduliai. Ping jutiklio specifikacijos yra įtampa 5 V, srovė yra 15 mA, jutiklio kampas NE> = 15 ir aptikimo atstumas yra 2 cm ~ 450 cm.

Pingo jutiklis
Žemiau parodyta ping jutiklio sąsaja su „Arduino“. Yra keturi kaiščiai, skirti sąsajai su jutiklio jutikliu su „Arduino“ lenta. Keturi „Arduino“ lentos kaiščiai yra GND, VCC, ECHO ir TRIGGER. Lentos kaiščiai yra D0-D13, tuo tarpu 12 ir 13 kaiščiai yra įvesties ir išvesties kaiščiai.
„Arduino“ mikrovaldiklis siūlo mums servo valdymo biblioteką, kuri leidžia mums lengvai perjungti servo servisus. Šiame projekte mes naudojome 5 servos aparatus, norėdami reguliuoti „Namaste“ roboto judesius, pvz., Galvą, dešinę alkūnę, kairę alkūnę, dešinę petį ir kairį petį. Čia skaitmeniniai įvesties / išvesties kaiščiai (D5, D6, D9, D10, D1) reiškia „Arduino“ plokštę, sujungtą su servovarikliais.
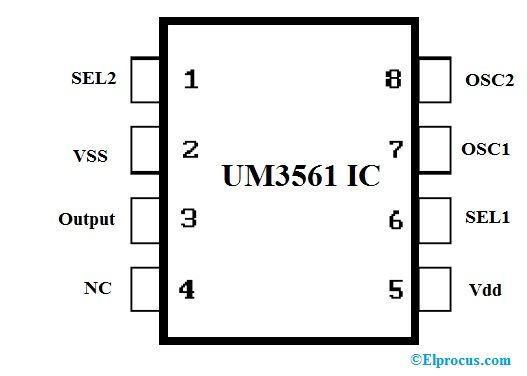
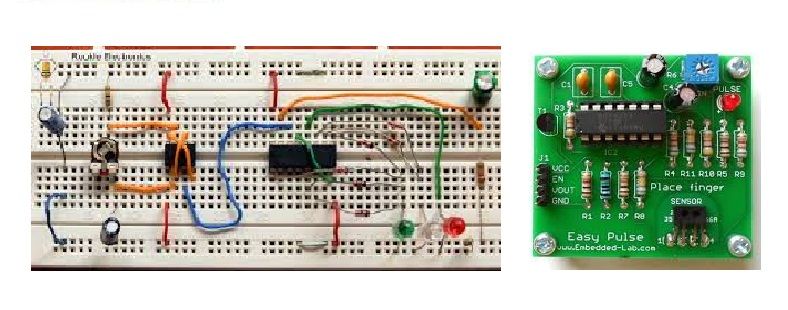
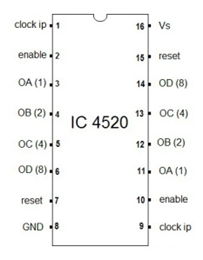
Balso atkūrimo IC
Šis balso atkūrimo IC siūlo įrašytą pranešimą, kuris leidžiamas iš anksto nustatytu dažniu. Atkūrimas perkeliamas į garso stiprinimo įrenginį.

Balso atkūrimo IC
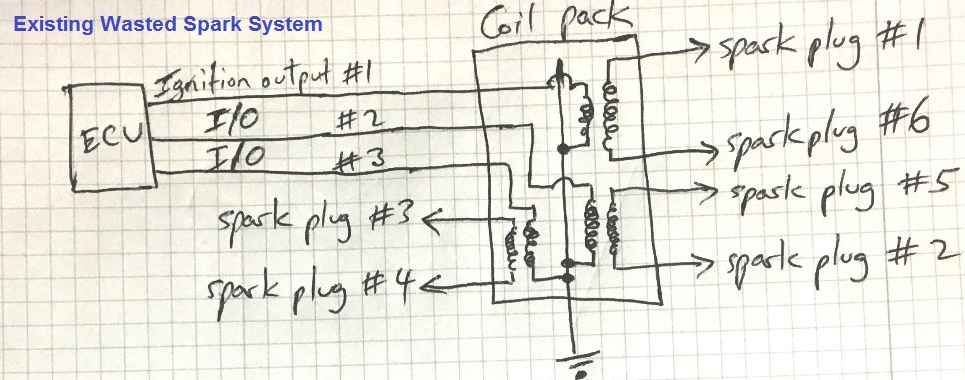
Estafetė
Į relė yra vienos rūšies jungiklis veikia elektra. Srovės srautas per relės ritę sukuria magnetinį lauką, kuris pakviečia svirtį ir keičia jungiklio kontaktus.

Estafetė
Valdymas balsu „Namastae“ robotas veikia
Robotą „Namaste“ galima atlikti palaipsniui atliekant procedūrą kartu su imituotais rezultatais. Kai „Namaste“ robotas yra pirmoje būsenoje, tada servo variklis Roboto 2, 3, 4, 5 s yra OFF arba nulinės būsenos. Roboto „Namaste“ galva keičiasi iš centro į dešinę, į kairę ir tada atgal į centrą dėl „Servo“ variklio1 sukimosi nuo 0 ° -180 °. Roboto galvos judėjimas nurodo, kad „Namaste“ robotas ieško kliūties. Kai ping jutiklis aptinka bet kokią kliūtį, roboto galvos padėtis grįžta į centrą, o „Servo“ variklis1 relikvijos 90 ° kampu ir išjungtas. Jis aktyvuojamas žemoje būsenoje.
Kai servo variklis1 išsijungia, tada įsijungia likę varikliai, pvz., Servo4 ir servo5. Signalo linija suveikia dešiniajam ir kairiajam „Namaste“ roboto pečiams. Dabar roboto rankos gali judėti aukštyn. Pečių servo varikliai yra susieti su „Arduino“ plokštės skaitmeniniais įvesties ir išvesties kaiščiais. Signalinės linijos arba šie kaiščiai bus aukšti, o servo padėtis pasikeis į 90 °. Dabar servo4 ir servo 5 išsijungia.
Galiausiai galime padaryti išvadą, kad pagrindinis šio balso valdymo tikslas robotas turi teikti paslaugą sutikti žmones mandagiai, aptikus priešais einančius žmones. Jį galima naudoti įvairiose viešose vietose, pavyzdžiui, parkuose, prekybos centruose, vakarėliuose ir kt. Tikimės, kad jūs geriau supratote šią koncepciją. Be to, bet kokie klausimai, susiję su šia koncepcija ar „arduino“ robotų projektai , pateikite savo vertingus pasiūlymus komentuodami žemiau esančiame komentarų skyriuje.
Nuotraukų kreditai:
- „Arduino“ lenta nyacknewsandviews
- Pingo jutiklis paralaksas
- Balso atkūrimo IC kealabas
- Estafetė netiesioginis
- „Namaste“ robotas canstockphoto







{kind=link}
{kind=link}
{kind=link}
{kind=link}