Trumpas roboto įvadas:
Robotas yra bet kuri mašina, kuri yra visiškai automatinė, t. Y. Ji pradeda pati, nusprendžia savo darbo būdą ir pati sustoja. Tai iš tikrųjų yra žmogaus kopija, sukurta palengvinti žmogaus naštą. Jį galima valdyti pneumatiniu būdu arba hidrauliniais būdais arba naudojant paprastus elektroninius valdymo būdus. Pirmasis pramoninis robotas buvo George'o Devolio ir Joe Engelbergerio sukurti „Unimates“ 50-ųjų pabaigoje ir 60-ųjų pradžioje.
Bet kuris robotas sukurtas remiantis 3 pagrindiniais dėsniais, kuriuos apibrėžė rusų mokslinės fantastikos autorius Isaacas Asimovas:
- Robotas neturėtų tiesiogiai ar netiesiogiai pakenkti žmogui.
- Robotas turėtų paklusti žmonių įsakymams, kol ir nepažeidžia pirmojo dėsnio.
- Robotas turėtų saugoti savo egzistavimą, jei nebus pažeisti pirmieji du įstatymai.

Fiksuotas robotas
Robotai gali būti fiksuoti robotai arba mobilieji robotai. Mobilieji robotai yra robotai su mobiliąja baze, kuri priverčia robotą laisvai judėti aplinkoje. Vienas iš pažangių mobiliųjų robotų yra „Line Follower“ robotas. Iš esmės tai yra robotas, kuris eina tam tikru keliu ar trajektorija ir nusprendžia savo veiksmus, kurie sąveikauja su kliūtimi. Kelias gali būti juoda linija ant baltų grindų (matoma) arba magnetinis laukas (nematomas). Jo taikymas prasideda nuo pagrindinio buitinio naudojimo iki pramoninio naudojimo ir kt. Dabartinė pramonės sąlyga yra tai, kad jie naudoja kranų sistemą siuntinius ar medžiagas iš vienos vietos į kitą. Kartais dideli svoriai gali pakelti kėlimo medžiagas ir pakenkti siuntiniams. Robotais sekanti linija paprastai naudojama vežant vaikus per prekybos centrus, namus, pramogų vietas, pramonę. Eilutės naudojimas robotinė transporto priemonė yra medžiagų transportavimas iš vienos vietos į kitą pramonės šakose. Šis roboto judėjimas visiškai priklauso nuo trasos. Robotas gali atlikti bet kokį dalyką, kurį nustatote jūs. Kaip ir gamyklose, viskas, ką jie turi padaryti gamindami savo produktus, yra roboto gamyba.

Mobilus robotas
Linijos sekėjo robotas
Linijos sekimo robotas yra robotas, kuris eina tam tikru keliu, valdomu grįžtamojo ryšio mechanizmo.
Pagrindinės linijos sekėjo roboto kūrimas:
Sukuriant pagrindinį linijos sekėjo robotą reikia atlikti šiuos veiksmus.
- Roboto mechaninės dalies arba korpuso projektavimas
- Robotų kinematikos apibrėžimas
- Roboto valdymo projektavimas

Linijos sekėjo robotas
Mechaninę roboto dalį arba korpusą galima sukurti naudojant „AutoCAD“ arba „Workspace“. „Basic Line“ sekimo robotas gali būti sudarytas iš pagrindo, kurio dviejuose galuose sumontuoti ratai. Stačiakampis kieto plastiko lakštas gali būti naudojamas kaip pagrindas. Tvirtas korpusas, pavyzdžiui, cilindras, gali būti pridedamas kartu su kitais formos kūnais, tarpusavyje sujungtais jungtimis, ir kiekvienas jų turi tam tikrą kryptį. „Line“ sekimo robotas gali būti ratinis mobilusis robotas su fiksuota baze, kojinis mobilusis robotas su keliais standžiais kūnais, sujungtais jungtimis.
Kitas žingsnis apima roboto kinematikos apibrėžimą. Kinematinė roboto analizė apima jo judėjimo aprašymą fiksuotos koordinačių sistemos atžvilgiu. Jis daugiausia susijęs su roboto judėjimu ir kiekvieno kūno judesiu, jei robotas yra kojomis. Tai paprastai apima roboto judėjimo dinamiką. Visa roboto trajektorija nustatoma naudojant kinematinę analizę. Tai galima padaryti naudojant „Workspace“ programinę įrangą.
Roboto valdymas yra svarbiausias jo darbo aspektas. Čia valdymo terminas reiškia roboto judesio valdymą, t. Y. Ratų judėjimo valdymą. Pagrindinės linijos sekimo robotas eina tam tikru keliu, o roboto judėjimas šiuo keliu valdomas valdant ratų sukimąsi, kurie dedami ant dviejų variklių ašių. Taigi, pagrindinė kontrolė pasiekiama valdant variklius. Valdymo schema apima jutiklių naudojimą kelio ir mikrovaldiklis arba bet kuris kitas prietaisas, valdantis variklio veikimą per variklio tvarkykles, remiantis jutiklio išvestimi.
2 Linijos sekėjo roboto valdymo būdai
- Nenaudojant mikrovaldiklių

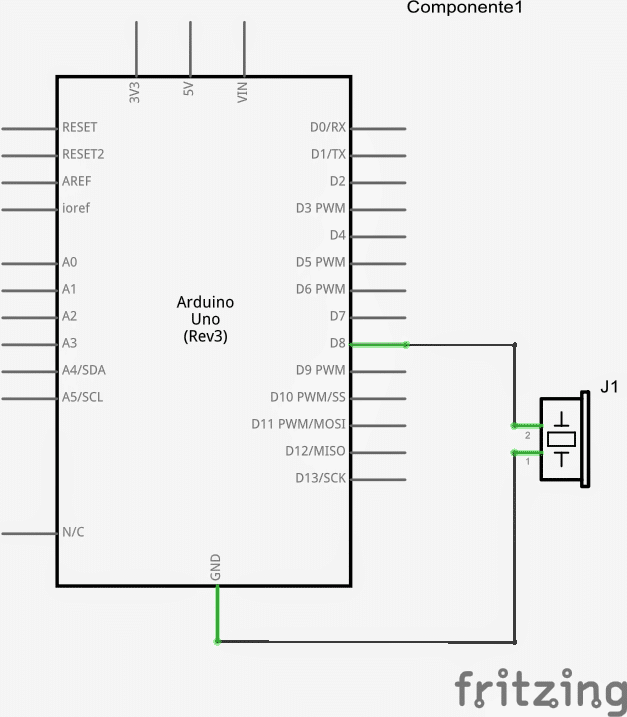
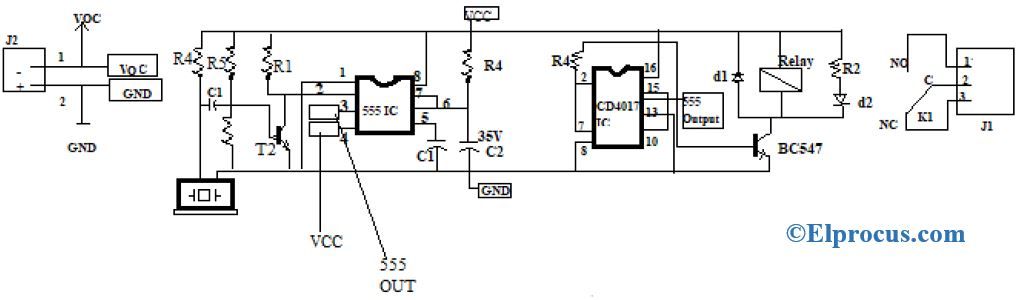
Valdymo sistemos blokinė schema
Jį sudaro IR-LED ir fotodiodų išdėstymas kiekvienam varikliui, valdomas įjungiant ir išjungiant tranzistorių.
Infraraudonųjų spindulių šviesos diodas, gaunantis tinkamą šališkumą, skleidžia infraraudonąją šviesą. Ši IR šviesa atsispindi esant baltam paviršiui, o atspindėta IR šviesa sklinda ant fotodiodo. Sumažėja fotodiodo varža, dėl kurios padidėja srovė per jį ir taip sumažėja įtampa. Fotodiodas yra prijungtas prie tranzistoriaus pagrindo ir dėl padidėjusios įtampos per fotodiodą tranzistorius pradeda laidyti, taigi variklis, prijungtas prie tranzistoriaus kolektoriaus, gauna pakankamai energijos, kad galėtų pradėti suktis. Jei kelyje, kuriame susiduria vienas iš jutiklių, yra juoda spalva, IR šviesa neatsispindi, o fotodiodas siūlo didesnį pasipriešinimą, dėl kurio tranzistorius sustabdo laidumą ir galiausiai variklis nustoja suktis.
Taigi visą sistemą galima valdyti naudojant paprastą LED-fotodiodo-tranzistoriaus išdėstymą.
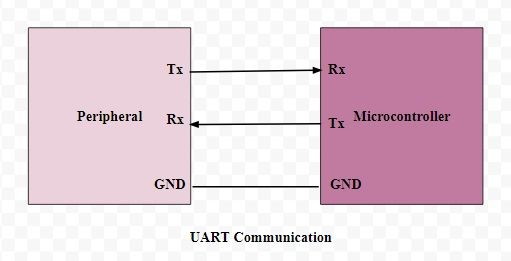
- Naudojant mikrovaldiklius
Veikimo principas:
Linijos kritimo robotas yra vienas iš savarankiškai veikiančių robotų. Tai aptinka ir padaro vietovėje nubrėžtą liniją. Liniją žymi balta linija ant bloko paviršiaus arba blokinė linija ant balto paviršiaus. Ši sistema turi būti prasminga. Ši programa priklauso nuo jutiklių. Čia kelio aptikimo tikslais naudojame du jutiklius. Tai yra artumo jutiklis ir IR jutiklis. Kelio aptikimui naudojamas artumo jutiklis ir kliūčių aptikimui naudojamas IR jutiklis. Šie jutikliai montuojami priekiniame roboto gale. Mikrovaldiklis yra intelektualus prietaisas, kurį visą grandinę valdo mikrovaldiklis.

Blokinė linija po robotizuota transporto priemone su mikrovaldikliu
Įvairių tipų valdomų robotizuotų transporto priemonių tipai:
Yra dviejų tipų valdomos robotizuotos transporto priemonės
- Mobilios linijos valdomos robotizuotos transporto priemonės
- RF pagrindu valdoma robotizuota transporto priemonė
Linijos sekėjo roboto programos:
- Pramoninės programos : Šie robotai gali būti naudojami kaip automatiniai įrangos vežėjai pramonėje, pakeičiantys tradicinius konvejerių diržus.
- Automobilių programos : Šie robotai taip pat gali būti naudojami kaip automatiniai automobiliai važiuoja keliais su įterptais magnetais.
- Vidaus taikymai : Jie taip pat gali būti naudojami namuose namų reikmėms, pavyzdžiui, grindų valymui ir pan.
- Orientavimo programos : Jie gali būti naudojami viešose vietose, tokiose kaip prekybos centrai, muziejai ir kt.
Privalumai:
- Roboto judėjimas yra automatinis
- Jis naudojamas tolimojo susisiekimo programoms
- Statybos paprastumas
- Talpinti ir pamiršti sistemą
- Naudojamas namuose, pramonės automatikoje ir kt.