Robotas yra intelektualus mechaninis įrenginys, o pirmuosius robotus sukūrė „Čekų dramaturgas Carelis Capekas“ 1920 m. Robotika yra inžinerijos šaka, užsiimanti projektavimu, kūrimu ir valdymu. Žodis robotika kilo iš termino robotas. Šiuo metu yra keletas robotų rūšių, tokių kaip serijiniai, lygiagrečiai, vaikščiojantys ir mobilieji robotai. Robotikos dalis daugiausia sudaro maitinimo šaltinis, valdikliai, griebtuvai, manipuliatoriai ir galiniai efektai. Kai galvojame apie robotą, pagrindinis mūsų protas yra tai, kad kažkas imituoja. Tačiau realiai roboto apibrėžimo nėra. Tačiau yra keletas pagrindinių savybių, kurias robotas turėtų turėti, pavyzdžiui, intelekto, jutimo, energijos ir judėjimo ir kt. Kai kurie robotai patys dirba, kad atliktų tam tikras užduotis. Tačiau alternatyviems robotams reikia pagalbos žmonėms. Todėl šie robotai yra priklausomi. Robotikos projekto idėjos yra visiškai naudojamos įvairiose programose, tokiose kaip medicina, komunikacija kosmose ir kt karines programas
Naujausios robotikos projekto idėjos inžinerijos studentams
Šiais laikais keli inžinerijos studentai rodo didelį susidomėjimą robotų projektais. Jie sukelia didelį susidomėjimą, palyginti su kitais elektronikos projektai . Išsilavinimo lygmeniu šie robotikos projektai yra labai populiarūs, jie yra robotai, sekantys robotu, pasirenkantys ir padedantys robotą, gaisro gesinimas, sieniniai bėgiai, humanoidai, Hexapod ir kt. Šios inžinerijos studentams skirtos robotikos projekto idėjos bus naudingos atliekant praktiką. . Taigi, mes linkę patarti inžinerijos studentams pasirinkti iš jų robotikos rinkiniai nes jie sugeba jiems veikti.

Robotika pagrįstos projekto idėjos
Karo lauko šnipinėjimo robotas naudojant „Night Vision“ belaidę kamerą
Pagrindinis šio projekto tikslas yra suprojektuoti robotizuotą transporto priemonę naudojant RF technologiją ir belaidę kamerą, kur RF technologija naudojama nuotoliniam valdymui, o belaidė kamera naudojama stebėjimo tikslams. Robotas kartu su kamera gali perduoti vaizdo įrašą su naktinio matymo galimybėmis. Šio tipo robotai yra naudingi karo laukuose šnipinėjimo tikslais. An 8051 mikrovaldiklis naudojamas norimoms operacijoms.

Karo lauko šnipinėjimo robotas su „Night Vision“ belaidžiu fotoaparatu
Šis projektas naudoja naktinio matymo kamerą vaizdams fiksuoti net tamsiose vietose ir bevieliu ryšiu perduoda televizoriaus imtuvui. Šie robotai naudojami karinėms reikmėms, pavyzdžiui, siunčiant informaciją valdymo blokui ir šnipinėjant priešo žemes. Šis robotas yra valdomas naudojant RF ryšį su mygtukų rinkiniu.
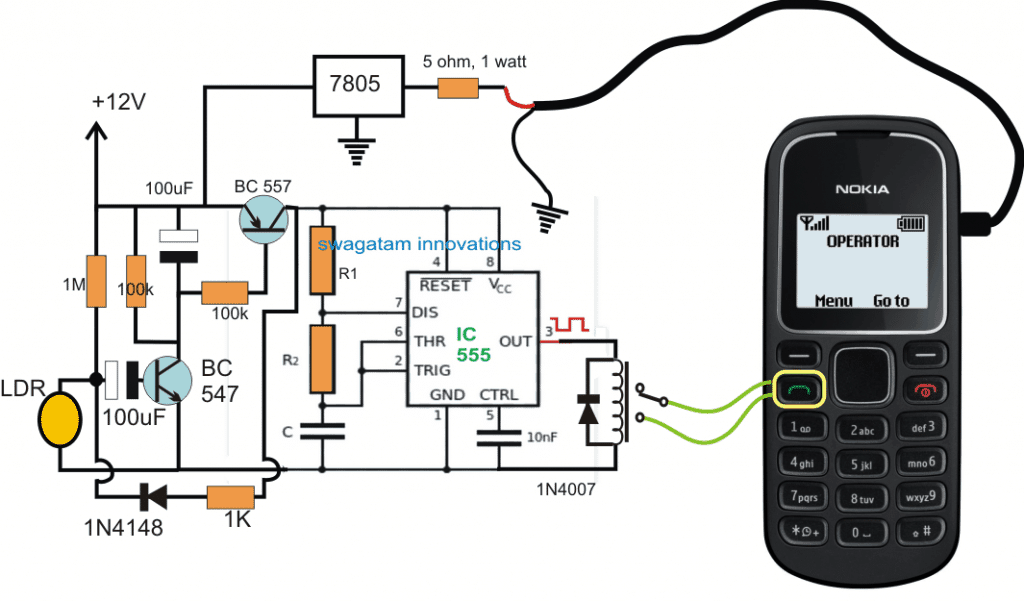
Be to, šį projektą galima sukurti naudojant DTMF technologija . Naudodamiesi šia technologija, mes galime valdyti robotizuotą transporto priemonę naudodamiesi mobiliuoju telefonu. Palyginti su RF technologija, ši technologija turi pranašumą, palyginti su dideliu ryšio diapazonu.
Auto metro traukinys, kursuojantis tarp dviejų stočių
Pagrindinis šio projekto tikslas yra pademonstruoti technologiją, naudojamą metro traukinių judėjime. Šis projektas naudojamas daugelyje išsivysčiusių šalių. Metro traukinyje yra valdiklis, leidžiantis automatiškai važiuoti traukiniu iš vienos stoties į kitą.

Auto metro traukinys į autobusą tarp stočių
Tai auto metro traukinio projektas suprojektuotas su automatiniu paleidimo ir sustabdymo mechanizmu. Kad metro traukinys sustotų tam tikru laiku ir prasidėtų po tam tikro laiko. Jį sudaro automatinis durų atidarymo ir uždarymo mechanizmas, kuris skaičiuoja žmonių skaičių įlipant į traukinį.
Stebėkite robotų transporto priemonės judėjimą
Pagrindinis šio projekto tikslas yra sukurti robotą, kuris seka tam tikrą kelią. Kelias gali būti juoda juosta ant baltų grindų. Važiuojanti robotizuota vikšrinė transporto priemonė yra naudojama įvairiose srityse - nuo vadovo automatinėse transporto priemonėse viešose vietose. Čia šią robotizuotą transporto priemonę suprojektavo poros jutiklių, kurie judėti lenkta juoda juosta, jautri abiem varikliams.

Stebėkite robotų transporto priemonės judėjimą
Šią vėžę aptinkančią robotą transporto priemonę sudaro du varikliai, nuolatinės srovės maitinimas. Šiuos du variklius valdo tranzistorius, kuris veikia kaip jungiklis. Du jutikliai, kiekvienas jutiklis su IR šviesos diodu ir fotodiodu, dedami po grandine. Kai du jutikliai pajunta baltas grindis, varikliai atitinkamai sukasi.
Sukant, susidūrus su juodu keliu, vienas iš variklių nustoja suktis kartu su jutiklio įėjimu. Jutiklio veikimo principas yra tas, kad kai IR šviesos diodas sukuria šviesą ant baltų grindų, jis atsispindi. Kai atspindėta šviesa nukrinta ant fotodiodo, ji sumažina savo atsparumą valdyti variklio jungiklio laidumą.
Metalo detektoriaus robotinė transporto priemonė
Pagrindinis šio projekto tikslas yra suprojektuoti robotizuotą transporto priemonę metalams ir sausumos minoms aptikti. Sausumos minos yra nestabilūs įtaisai, esantys po žeme, ir pavojinga aptikti tuos rankiniu būdu naudojant metalo detektorius. Šiame projekte į robotą yra įmontuotas metalo detektorius, kuris valdomas naudojant RF ryšį.

Metalo detektoriaus robotikos projekto idėjos
Siųstuvo gale mygtukų skaičius yra susieta su mikrokontrole r paleisti robotą tam tikru judesiu. Paspaudus mygtuką, signalas siunčiamas į mikrovaldiklį, kuris siunčia dvejetainius duomenis į mygtuką. Koderis naudojamas lygiagrečiams duomenims konvertuoti į nuoseklius duomenis ir ši komanda perduodama naudojant RF modulį.
Imtuvo gale šį signalą dekoduoja dekoderis. Remiantis signalu, mikrovaldiklis duoda susijusius signalus variklio vairuotojui, kad jis varytų variklius. Taigi robotas juda norimu judesiu. Roboto grandinėje yra įmontuotas metalo detektorius, kuris aptinka metalą ir duoda indikaciją naudodamas garsinį signalą.
RF valdoma robotizuota transporto priemonė su lazerio pluošto išdėstymu
Šis projektas skirtas valdyti robotizuotą transporto priemonę naudojant RF technologijas. Mažos galios lazerio šviesa yra sujungta, kad būtų galima parodyti tolimo objekto galą jo spinduliu. Norimai operacijai naudojamas mikrovaldiklis 8051.

RF valdoma robotizuota transporto priemonė su lazerio pluošto išdėstymu
Perduodančiame gale mygtukai naudojami imtuvui siųsti nurodymus, kaip valdyti roboto judėjimą judant dešinėn, kairėn į priekį arba atgal. Priėmimo gale du varikliai yra susieti su mikrovaldikliu, kur jie naudojami transporto priemonei judėti.
RF siųstuvas veikia kaip RF nuotolinio valdymo pultas, kurio pranašumas yra tinkamas nuotolis (iki 200 metrų) su tinkama antena, o imtuvas dekoduoja prieš tiekdamas jį į kitą mikrovaldiklį, kad nuolatinės srovės varikliai būtų varomi per variklio vairuotojo IC reikalingiems darbams atlikti.
Ant roboto korpuso sumontuotas lazerinis švirkštiklis ir jo veikimas atliekamas iš mikrovaldiklio išvesties per atitinkamą signalą iš perdavimo galo. Naudojama lazerio šviesa yra skirta tik demonstravimui, o ne galinga.
Be to, šį projektą galima patobulinti naudojant DTMF technologija . Naudodamiesi šia technologija, mes galime valdyti robotizuotą transporto priemonę naudodamiesi mobiliuoju telefonu. Ši technologija turi pranašumą, palyginti su dideliu ryšio diapazonu, palyginti su RF technologija.
Linija po robotine transporto priemone
A linijos sekantis robotas yra robotas, einantis tam tikru keliu, kuriuo jis juda. Kelias gali būti juodas kelias ant baltų grindų arba magnetinis laukas. Šie robotai naudojami įvairiose srityse: nuo vadovo viešose vietose iki automatinių transporto priemonių. Čia sukurta robotinė transporto priemonė, einanti po linijos, sukurta judėti lenktu juodu keliu, kurį juto pora jutiklių kiekvienam varikliui. Čia robotizuotą transporto priemonę sudaro du varikliai, o kiekvieno variklio nuolatinės srovės maitinimas valdomas naudojant tranzistorių, kuris veikia kaip jungiklis.

Linija po robotikos projekto idėjomis
Po grandine dedama pora jutiklių, kurių kiekvienas turi IR šviesos diodą ir fotodiodą. Jutikliai jaučia baltas grindis, o varikliams atitinkamai sukama. Sukant, susidūrus su juodu keliu, vienas iš variklių nustoja suktis su jutiklio įėjimu. Jutiklis veikia pagal principą, kad kai IR šviesos diodo šviesa patenka į baltą paviršių, jis atsispindi, o ši atspindėta šviesa, patekusi į fotodiodą, sumažina jo atsparumą, kad būtų galima valdyti variklio jungiklio laidumą.
Kliūčių vengimo robotinė transporto priemonė
Robotą galima valdyti atskirai aptinkant aplinką arba rankiniu būdu naudojant nuotolinio valdymo pultą ar kitas priemones. Čia sukurtas visiškai automatinis robotas, kuris pajunta plotą aplink jį ir atitinkamai juda. Įterptas jutiklio išdėstymas, kuris nujaučia visus priešais esančius daiktus, todėl robotas keičia savo kryptį, kad išvengtų susidūrimo. Tokios robotizuotos transporto priemonės gali būti naudojamos tokiose vietose kaip šventovės ir kt.

Kliūčių vengimo robotinė transporto priemonė
Ultragarsinis jutiklis naudojamas bet kokių kliūčių nustatymui. Šie jutikliai veikia ultragarso bangų atspindėjimo objektuose, kuriuos gauna jutikliai, paverčiamais elektriniais signalais, principu. Gavęs bet kokį pertraukimo signalą, mikrovaldiklis taip duoda tinkamą komandą variklio vairuotojui, kad vienas iš variklių būtų sustabdytas, o kitas variklis suktųsi, suteikdamas robotui kryptį.
„Pick N Place“ robotizuota transporto priemonė su minkšta gaudymo griebtuvu
Naudojant robotą transporto priemonę galima pasiimti daiktus ir juos atitinkamai pastatyti. Šiuo tikslu robotai susideda iš galinių vykdytuvų, kurių momentas yra atitinkamai valdomas naudojant variklius. Robotinė transporto priemonė nuotoliniu būdu valdoma mygtukų rinkiniu, naudojant radijo ryšį.

Pasirinkite ir padėkite robotą
Siųstuvo pusėje klaviatūra yra susieta su mikrovaldikliu ir paspaudus atitinkamą klavišą, mikrovaldiklis sukuria dvejetainį kodą šiam klavišui, o šis dvejetainis kodas paverčiamas serijine forma ir siunčiamas per RF modulį ir RF anteną.
Imtuve du varikliai naudojami tam, kad robotas galėtų judėti atitinkamai, o kiti du varikliai naudojami valdyti griebtuvo judėjimą, kad būtų galima laikyti bet kurį daiktą ir pastatyti jį į norimą vietą. Iš siųstuvo siunčiamas komandas iššifruoja ir naudoja mikrovaldiklis, kad duotų tinkamus signalus variklio vairuotojo IC.
Gaisro gesinimo robotinė transporto priemonė
Robotus galima naudoti daugelyje pavojingų situacijų, pavyzdžiui, įvykus gaisro avarijai. Čia toks prototipas yra demonstracija, kurią sudaro vandens vamzdis su antgaliu ir siurblys. Roboto judėjimas, taip pat vandens purškimas antgaliu, valdomas nuotoliniu būdu, naudojant mygtukų rinkinį, o komandos perduodamos robotui per RF ryšį.

RF pagrįstas gaisro gesinimo robotizuotų transporto priemonių projektas
Jutiklinio ekrano nuotoliniu būdu valdoma robotizuota transporto priemonė parduotuvių valdymui
Čia sukurtas robotas, kurį galima pasirinkti ir valdyti naudojant RF ryšį. Jutiklinio ekrano skydelis naudojamas komandoms, kurias perduoda ir priima robotas, kad robotas tinkamai judėtų norima kryptimi ir valdytų išrinkimo ir padėjimo operaciją.
Spalvų jutimo robotas su MATLAB
Šis projektas įgyvendina robotizuotą transporto priemonę, kad būtų galima nustatyti užfiksuotų vaizdų spalvas naudojant MATLAB. Šis projektas yra labai naudingas mažinant žmonių pastangas aptinkant spalvų spalvas. Šį projektą galima įgyvendinti naudojant vaizdo apdorojimo techniką, pagrįstą MATLAB. Šis robotas turi keletą funkcijų, naudojančių MATLAB, pavyzdžiui, spalvų aptikimas, žmogaus pastangos gali būti sumažintos, efektyvios ir taupomas laikas.
„Arduino“ pagrindu valdomas išmaniųjų telefonų robotas
Šis projektas naudojamas kuriant „Arduino“ pagrindu veikiantį išmaniuoju telefonu valdomą robotą automobilį. Šis „Android“ telefonu valdomas robotas valdo robotą naudodamas „Bluetooth“ technologiją. Pagrindiniai šio projekto komponentai yra automobilis robotas, „Arduino Uno“, „Android“ telefonas ir „Bluetooth“ modulis. Tam „Android“ mobiliojo telefono vartotojas turi atsisiųsti ir įdiegti programą į savo mobilųjį telefoną, o tada mobiliojo telefono vartotojas turi išjungti „Bluetooth“ parinktį mobiliajame telefone.
Čia „Bluetooth“ yra belaidžio ryšio technika, atliekanti pagrindinį vaidmenį valdant robotą. Čia „Android“ telefonas generuoja komandas „Bluetooth“, kuris yra sujungtas su robotu. Komandos juda dešinėn, kairėn, pirmyn ir atgal. Šis „Bluetooth“ imtuvas gauna komandas ir perduoda jas mikrovaldikliui valdyti variklį. Po to šis mikrovaldiklis siunčia signalą variklio tvarkyklės IC, kad įjungtų variklį.
Robotikos projektai naudojant „Arduino“
„Arduino“ pagrįstų robotikos projektų idėjų sąrašas aptariamas toliau.

„Arduino“ robotikos projekto idėjos
Robotas vejapjovė veikė per „Arduino“
Šis projektas sukuria robotą, kuris naudojamas pjauti žolę nurodytoje sodo vietoje, išvengiant kliūčių. Šį robotą galima valdyti naudojant saulės energiją naudojant „Arduino“ valdiklį kaip centrinį valdymo įtaisą.
„Smart Boat Robot“, naudojant „Arduino Board“
Šis paprastas robotizuotas projektas yra sukurtas kartu su „Arduino“ lenta, kad padarytų šerną kliūtims aptikti, šviesos valdymui ir kt.
Robotas šviesai ieškoti naudojant „Arduino“
Šis projektas naudojamas projektuojant lengvą robotą. Šio projekto valdymas gali būti atliekamas naudojant šviesą be roboto įsikišimo. Taigi toks projektas taip pat vadinamas lengvu robotu. Šis projektas gali būti sukurtas naudojant „Arduino“ lentą, įskaitant kliūčių aptikimo galimybę.
Sniego valymo robotas
Šis projektas naudojamas projektuojant sniego valytuvą su „Arduino Uno“. Šis robotas veikia naudodamas komandas, kurios perduodamos iš radijo dažnio įrenginio. Šis prietaisas naudojamas norimu būdu valdyti roboto ir plūgo judesius.
Savęs balansavimo robotas
Pagrindinis šio projekto tikslas yra sukurti pusiausvyros robotą, apimančią du ratus. Šį projektą galima sukurti naudojant „Arduino“ atskiram skaitmeniniam valdymui, kad būtų užtikrintas stabilumas.
Keturkojis robotas
Šis projektas naudojamas projektuojant keturkampį robotą. Tai paprastas ir nebrangus keturkojis robotas, apimantis du servo servisus, valdomus per „Arduino Uno“ valdiklį.
Robotas manipuliatorius naudojant Arduino
Projektas įgyvendina robotizuotą ranką, kurios funkcijos yra panašios kaip žmogaus rankos. Šias funkcijas galima pasiekti rankoje integruota programa. Suprojektuoti robotą manipuliatorių galima naudojant „Arduino“ valdiklį.
Robotas „Omni Wheels“
Šis projektas įgyvendina „Omni“ ratų robotą. Šį robotą labai lengva suprojektuoti ir surinkti. Šis robotas leidžia atlikti naujus veiksmus. Šį robotą galima įdiegti naudojant „Arduino“ plokštę per variklio vairuotojo grandinę.
Robotas dulkių siurblys naudojant „Arduino“
Šis projektas sukuria autonominį dulkių siurblio robotą. Šis robotas naudojamas namų valymui be žmogaus įsikišimo per jutiklius, „Arduino“ valdiklį ir variklio tvarkyklę.
Robotų idėjos ateičiai
Mūsų kasdieniame gyvenime robotai naudojami keliems tikslams skirtingose šakose. Tarp jų toliau išvardyti kasdieniame gyvenime naudojami robotai. Robotikos projektų idėjų sąrašas kasdienio gyvenimo mokslo projektuose yra
- Savarankiškas robotas
- Robotai kovai su nusikalstamumu
- Robotai gynybos, saugumo ir priežiūros srityse
- Robotai švietimo srityje
- Robotai kaip tarnas
- Virimo robotai
- Robotai medicinos srityje
- Robotai pavojingiems darbams atlikti
- Namų priežiūros robotai
Robotų rankų projekto idėjos
Šios robotikos projekto idėjos yra pagrįstos robotų rankų projektais, kuriuose naudojamas „Arduino“ inžinerijos studentams.

Robotikos projekto idėjos, paremtos „Arm“
Roboto ranka valdoma per belaidę pirštinę
Šiame projekte įdiegta roboto rankos valdymo sistema naudojant belaidę pirštinę. Šis projektas gali būti sukurtas naudojant „Arduino Nano“, baterijas, siųstuvo-imtuvo modulį, servo variklį ir susijusį jutiklį.
Roboto ranka valdoma per „Nunchuck“
Šis projektas nurodo, kaip programuoti ir pritvirtinti robotų ranką, naudojant „Arduino Mega“. Šis projektas yra kitoks, palyginti su kitais ginklais pagrįstais projektais, nes jame naudojama „Nintendo Nunchuk“, skirta valdyti robotą. Tai labai paprasta rasti, pigu ir apima jutiklių grupę.
Roboto ranka valdoma per gestą
Šis projektas sukuria robotą, kurį galima valdyti rankos mostu. Čia gestams fiksuoti naudojamas kinetinis jutiklis. Robotinę ranką galima sukurti naudojant servo variklius, imituojančius dešinės rankos petį ir rankos judesius.
Kompiuterio pelės valdoma robotų ranka
Šis projektas naudojamas projektuojant robotą ranką, kurią galima valdyti per kompiuterio pelę. Šis projektas taip pat naudojamas vaizdo apdorojimui, priimant savo sprendimą naudojant MATLAB.
„Android App“ valdoma robotų ranka
Šis projektas daugiausia vykdomas valdant roboto ranką naudojant „Arduino“ ir „Bluetooth“ modulį naudojant „Android“ programą. Reikalingi šio projekto komponentai yra nuolatinės srovės variklis, „Arduino“ mega ir „Bluetooth“ modulis (HC-05).
Toliau pateikiami keli įdomūs dalykai Robotikos projekto idėjos su santraukomis paskutinio kurso inžinerijos studentams. Šių robotikos projekto idėjų blokų schemos informaciją kartu su santrauka galite gauti spustelėję nuorodas „abstraktus“.
- RF valdoma robotizuota transporto priemonė su lazerio spindulių išdėstymu - Santrauka .
- Linija po robotizuota transporto priemone - Santrauka .
- Pasirinkite ir padėkite su minkštu griebtuvu - Santrauka .
- Gaisro gesinimo robotinė transporto priemonė naudojant mikrovaldiklį - Santrauka .
- RF valdomas robotas su „Night Vision“ belaidžiu fotoaparatu šnipinėjimui karo lauke - Santrauka .
- Mikrokontrolerio pagrindu sukurta linija, sekanti robotizuotą transporto priemonę - Santrauka .
- Kliūčių vengimo robotinė transporto priemonė naudojant ultragarso jutiklį - Santrauka .
- Auto metro traukinys į autobusą tarp stočių - Santrauka .
- IR valdoma robotizuota transporto priemonė - Santrauka .
- Mobiliuoju telefonu valdoma robotizuota transporto priemonė - Santrauka .
- Metalo detektoriaus robotinė transporto priemonė - Santrauka .
- Balsu valdoma robotizuota transporto priemonė su tolimojo kalbos atpažinimo funkcija - Santrauka
- Priešgaisrinis robotas, kurį nuotoliniu būdu valdo „Android“ - Santrauka
- IR valdoma robotizuota transporto priemonė - Santrauka
Mini projektai apie robotiką
Mini robotikos projekto idėjose pateikiama ši informacija. Šios robotikos projekto idėjos yra labai naudingos pradedantiesiems, taip pat inžinerijos diplomų studentams.

Paprastos robotikos projekto idėjos
Robotas bombų aptikimui
Šis robotas naudojamas bombai aptikti atitinkamoje vietoje. Šį robotą asmuo gali valdyti belaidžiu radijo dažniu naudodamas kompiuterį. Kai robotas aptiks bombą, jis sukels garsą ir bomboje bus pakeista ardomoji medžiaga, kuri gali padaryti didelę žalą aplinkai. Tam į siūlomą sistemą įtraukta metalo detektoriaus grandinė.
Roboto ranka valdoma per nuotolinio valdymo pultą
Šis projektas įgyvendina robotų ranką, valdančią per nuotolinio valdymo pultą. Šis robotas sumažina žmonių pastangas įvairiose pramonės šakose, sutrumpindamas laiką. Šie robotai naudojami konkrečiai užduočiai valdyti per nuotolinio valdymo pultą. Čia šis robotas yra iš anksto užprogramuotas konkrečiai užduočiai atlikti. Šis projektas naudoja nuotolinio valdymo pultą robotų rankai valdyti. Infraraudonųjų spindulių signalą, gaunamą iš siųstuvo, galima nustatyti per IR imtuvą naudojant pagrindinį fotodiodą.
GSM nepilotuojama arialinė fotografija naudojant nuotolinį skraidantį robotą
Šis projektas naudojamas žmogaus atvaizdui užfiksuoti ir siunčia jį į asmeninį kompiuterį per bevielį garsą ir vaizdą gynybai. Ši sistema suprojektuoja lengvą ir tinkamą stebėjimo, naudojant jutiklį, veikimo sistemą.
Jutiklis turi būti bent dvi minutes bent 30 minučių aukštyje, kad būtų galima matyti subalansuotą plotą žemiau.
Atpažįstama vaizdo informacija turi būti nusiųsta į imtuvo tašką žemėje, kuri teisingai yra stebėjimo srityje. Naudojamas jutiklis turi sugebėti pastebėti objektus aukščiau nurodytomis sąlygomis. Šios sistemos konfigūracijoje yra jutiklis, stebėjimas, duomenų ryšys, duomenų apdorojimo mechanizmas ir palaikymo sistema.
Roboto su optine odometrija navigacija
Šis projektas sukuria robotą navigacijai naudojant optinę odometriją. Pagrindinės autonominių mobiliųjų robotų problemos yra jų sugebėjimas saugiai ir nuosekliai ieškoti kelio aplinkoje.
Belaidis bepilotis tanklaivio robotas
Šiuo projektu suprojektuota valdymo sistema, naudojama robotizuotai transporto priemonei, kad ją būtų galima valdyti per radiją ir kompiuterį. Šioje siūlomoje sistemoje robotą galima valdyti remiantis pateiktais infraraudonųjų spindulių jutiklio atsiliepimais. Šis jutiklis yra esminė objektų aptikimo grandinės dalis.
Spiečio robotai
Šie robotai dirba su dirbtinio būrio žvalgyba, kurioje naudojami keli robotai. Šie robotai derinasi tarpusavyje, kad atliktų užduotį. Šiuos robotus galima bendrauti belaidžiu būdu ir jie eina atitinkamai. Šiame projekte du robotai yra sukurti kaip vienas os meistras, o kitas yra vergas, tačiau ryšį tarp šių dviejų robotų galima atlikti belaidžiu ryšiu. Čia pagrindinis robotas naudojamas valdyti vergo robotą vykdant savo misiją, o roboto robotas veikia priklausomai nuo gauto signalo iš pagrindinio roboto.
Valymo robotas
Šiame projekte suprojektuotas robotas, būtent valymo robotas, kuris palaiko namo švarą ir blizgesį. Naudojant šį robotą, grindis ir sienas valyti namuose galima labai lengvai naudojant „Smartphone“ paspaudus mygtukus.
Robotikos projekto idėjos diplomų ir inžinerijos studentams
Robotikos srityje svarbu užsiimti robotų projektavimu, eksploatavimu, konstrukcija, konstrukciniu išdėstymu, gamyba ir pritaikymu. Naudojant kompiuterines technologijas galima dirbti su jų valdymu, sensoriniu grįžtamuoju ryšiu ir informacijos apdorojimu naudojant atitinkamą aparatūrą ir jutiklius. Robotikoje naudojama daugybė variklių, kuriuos valdo specialūs mikrovaldikliai su atitinkama programa. Todėl, norint kurti robotų programas, būtina mokėti kalbą montuojant ir „C“.
Šiais laikais daugelis inžinerijos studentų labai domisi robotikos projektais ir kelia didelį susidomėjimą, palyginti su kitais. Tokie robotai, kaip sekimas linija, n vietos parinkimas, gaisrų gesinimas, sieninis bėgis, šešiakampis, humanoidas ir kt., Yra keli populiarūs projektai akademiniame lygmenyje.
Čia išvardytos naujausios robotikos projekto idėjos, skirtos inžinerijos studentams.
- Ultragarso kliūčių aptikta robotinė transporto priemonė
- Robotinių transporto priemonių judėjimas mobiliuoju telefonu
- Robotinė transporto priemonė, valdoma televizoriaus nuotolinio valdymo pulto
- Akselerometro (giroskopo) valdomas robotas
- Radijo dažnio (RF) valdomas belaidis robotas
- Balsu valdomas robotas su garsiakalbių atpažinimo technologija
- Kompiuteriu valdomas „Pic and Place“ robotas (laidinis arba belaidis)
- „Zigbee“ valdoma valtis su belaidžiu vaizdo ir balso perdavimu su naktinio matymo galimybe
- Autonominis robotas su dirbtiniu regėjimu kliūčių aptikimui
- Dūmų ir SND dujų aptikimo robotas su belaidžiu valdymu
- Matomos šviesos sekėjas robotas
- „Android“ mobiliuoju telefonu valdomas „Bluetooth“ robotas
- Belaidžiu būdu valdomas karo lauko šnipinėjimo robotas su naktinio matymo belaidžiu fotoaparatu
- Skraidančio keturračio rotoriaus smulkintuvo su vaizdo kamerų stebėjimo sistema statyba
- Skaitmeninis kompasas ir GPS pagrįstas savarankiškas navigacijos robotas
- Bombos aptikimo robotas
- DTMF pagrįstas bežmogis robotų valčių valdymas vandenynų tyrimams
- „Wifi“ robotas valdomas iš „Android“ išmaniojo mobiliojo telefono
- Belaidis kambario gaiviklis, purškiantis robotą su vaizdo vaizdu
- DTMF pagrįstas robotas, valdomas mobiliuoju telefonu
- skraidantis „Quad“ robotų smulkintuvas su belaidžiu vaizdo fotoaparatu
- GPS ir „Digital Compassed“ pagrįstas savarankiškas navigacijos robotas
- Bomba išstumiantis robotas su belaidžiu vaizdo fotoaparatu valdomu kompiuteriu / nešiojamuoju kompiuteriu
- GSM (SMS) mobiliuoju telefonu valdomas išmanusis robotas
- Belaidis stebėjimo sistemos balso ir vaizdo perdavimo robotas
- Infraraudonųjų spindulių šviesos paieškos robotas (TV valdomas nuotoliniu būdu)
- Tiesioginis žmogaus aptikimo ir perspėjimo robotas
- Mikroelektromechaninis jutiklis (MEMS) Akselerometras / žiroskopas pagrįstas savaiminio balansavimo robotas
- Mobilusis telefonas „Bluetooth“ valdomas robotas
- Mobiliuoju telefonu valdomas keturkojis vaikščiojimo robotas su greičio ir krypties valdymu
- Kliūčių aptikimo robotas su mechaniniais jutikliais
- Kliūčių aptikimo robotas su ultragarso jutikliais
- Kompiuteriu valdomas laidinis robotas
- Belaidžiu būdu valdomas „Land Rover“ karo laukas, kuris įspėja apie pasodintų žemės minų aptikimą
- Žmogaus ir roboto sąsaja, naudojant tvirtą kalbos atpažinimą
- Kompiuteriu valdomas belaidis daugiafunkcis robotas
- Belaidžiu būdu valdomas gesintuvas robotas su vandens srovės purškimu
- Nuotoliniu būdu valdomas „Land Rover“
- Roboto valdoma belaidė garso ir vaizdo perdavimo kamera
- Servo varikliu valdoma belaidė vaizdo kamerų valdymo sistema
- Sienos sekėjo robotas
- kalbos valdoma belaidžio lifto sistema
- Kalbos atpažinimo robotas su ultragarso kliūčių vengimo sistema
- Jutiklinio ekrano valdomas intelektualus robotas
- Balso valdoma intelektuali gesintuvo transporto priemonė
Gaukite daugiau informacijos apie įvairius dalykus Mikrovaldikliais paremti robotikos projektai inžinerijos studentams .
Taigi, viskas susiję su įvairių sričių diplomų ir inžinerijos studentų, tokių kaip „Arduino“, „Mini“, „Arm“ projektų idėjomis, ateities idėjomis ir kt., Robotų projekto idėjų sąrašu. Tai yra įdomiausios naujausios robotikos projekto idėjos, skirtos paskutiniųjų metų inžinerijos studentams. . Viduje konors akademinis robotikos lygis projektai naudojant mikrovaldiklį ar robotų rinkiniai yra labai garsūs. Taigi šie robotų projektai bus gana naudingi studentams. Be to, bet kokie klausimai dėl šių projektų ar paprasti robotikos projektai pradedantiesiems galite pateikti savo vertingus pasiūlymus komentuodami toliau pateiktoje komentarų skiltyje.

![Atmosferos slėgio indikatoriaus grandinė [LED barometro grandinė]](https://electronics.jf-parede.pt/img/3-phase-power/40/atmospheric-pressure-indicator-circuit-led-barometer-circuit-1.jpg)