

Pramonės automatika ir valdymas
Šiais laikais pramoninės automatikos sistemos tapo populiarūs daugelyje pramonės šakų ir vaidina svarbų vaidmenį kontroliuojant kelias su procesu susijusias operacijas. Dėl to, kad yra įdiegta daugybė pramoninių tinklų, jų geografinis pasiskirstymas gamykloje ar pramonėje, grindų duomenų perdavimo ir valdymo galimybės tapo sudėtingesnės ir lengvesnės, pradedant žemo lygio ir aukšto lygio valdymu. Šie pramoniniai tinklai yra nukreipiami per įvairias lauko magistrales, naudojančias įvairius ryšio standartus, pvz., CAN protokolą, „Profibus“, „Modbus“, „Device net“ ir kt. Taigi, pažvelkime, kaip veikia CAN ryšys automatizuojant pramonę ir kitas automatizavimo sistemos .
Pramonės automatikos ir valdymo įvadas
Žemiau pateiktame paveiksle parodyta pramoninės automatikos ir valdymo architektūra, kurioje visos sistemos automatizavimui atliekami trys valdymo lygiai. Šie trys lygiai yra valdymas ir automatika, procesų valdymas ir aukštesnio lygio valdymas. Valdymo ir automatikos lygį sudaro įvairūs lauko įrenginiai, pvz., Jutikliai ir pavaros, skirtos stebėti ir valdyti proceso kintamuosius.

Pramonės automatikos architektūra
Proceso valdymo lygis yra centrinis valdiklis, atsakingas už kelių valdymo prietaisų, tokių kaip., Valdymą ir priežiūrą Programuojami loginiai valdikliai (PLC) ir vartotojo grafinės sąsajos, tokios kaip SCADA ir Žmogaus ir mašinos sąsaja (HMI) taip pat priskiriami šiam lygiui. Aukštesnis užsakymų kontrolės lygis yra įmonės lygis, valdantis visas su verslu susijusias operacijas.
Atidžiai stebėdami aukščiau pateiktą diagramą ir jos kiekvieną lygį, taip pat tarp lygių, ryšių magistralės, tokios kaip Profibus ir pramoninis Ethernet yra laikomi susijusiais su keitimusi informacija. Todėl ryšio magistralė yra pagrindinis pramoninės automatikos komponentas, užtikrinantis patikimą duomenų perdavimą tarp valdiklių, kompiuterių ir iš lauko įrenginių.
Valdymo srities tinklas arba CAN protokolas

Atvirų sistemų sujungimo (OSI) modelis
Duomenų perdavimas yra duomenų perdavimas iš vieno taško į kitą. Siekdama paremti pramoninį ryšį, Tarptautinė standartizacijos organizacija sukūrė atvirų sistemų sujungimo (OSI) modelį, skirtą duomenų perdavimui tarp įvairių mazgų. Šis OSI protokolas ir sistema priklauso nuo gamintojo. CAN protokole iš septynių OSI modelio sluoksnių naudojami du apatiniai sluoksniai, ty fiziniai ir duomenų ryšio sluoksniai.
Valdiklio srities tinklas arba CAN protokolas yra daugialypis nuosekliojo ryšio magistralė , ir tai yra nepriklausomų valdiklių tinklas. Dabartinė CAN versija naudojama nuo 1990 m., Ją sukūrė „Bosch“ ir „Intel“. Jis siunčia pranešimus į tinkle pateiktus mazgus, siūlydamas perdavimo greitį iki 1 Mbps. Kad perdavimas būtų efektyvus, reikia vadovautis patikimais klaidų aptikimo metodais, o arbitražui dėl pranešimo prioriteto ir susidūrimo aptikimo - naudojamas daugialypės terpės nešlio protokolas. Dėl šių patikimų duomenų perdavimo charakteristikų šis protokolas buvo naudojamas autobusuose, automobiliuose ir kitose automobilių sistemose, gamyklų ir pramonės automatikoje, kasybos programose ir kt.
CAN duomenų perdavimas
CAN protokolas yra ne adresu pagrįstas protokolas, o į pranešimą orientuotas protokolas, kur CAN įdėtas pranešimas turi perduodamų duomenų turinį ir prioritetą. Priimdami duomenis magistralėje, kiekvienas mazgas nusprendžia, ar išmesti, ar apdoroti duomenis, o tada, priklausomai nuo sistemos, tinklo pranešimas yra skirtas vienam mazgui ar daugeliui kitų mazgų. CAN ryšys leidžia tam tikram mazgui prašyti informacijos iš bet kurio kito mazgo, siunčiant RTR (nuotolinio perdavimo užklausą).

CAN protokolo duomenų perdavimas
Jis siūlo automatinį duomenų perdavimą be arbitražo perduodant aukščiausio prioriteto pranešimą ir palaikant bei laukiant žemesnio prioriteto pranešimo. Šiame protokole dominuojantis yra loginis 0, o recesyvinis - loginis 1. Kai vienas mazgas perduoda recesyvinį bitą, o kitas - dominuojantį bitą, tada dominuojantis bitas laimi. Prioritetine arbitražo schema nusprendžiama, ar bus suteiktas leidimas tęsti perdavimą, jei du ar daugiau įrenginių pradės perduoti tuo pačiu metu.
GALI pranešimų rėmas
CAN ryšio tinkle gali būti sukonfigūruoti skirtingi rėmelio ar pranešimo formatai.
- Standartinis arba pagrindinio kadro formatas arba CAN 2.0 A
- Išplėstinio kadro formatas arba CAN 2.0 B

Standartinis arba pagrindinio kadro formatas arba CAN 2.0 A
Skirtumas tarp šių dviejų formatų yra tas, kad bitų ilgis, ty bazinis kadras palaiko identifikatoriaus 11 bitų ilgį, o išplėstinis kadras palaiko identifikatoriaus 29 bitų ilgį, kurį sudaro 18 bitų plėtinys ir 11 bitų identifikatorius. IDE bitai skiriasi CAN išplėstinio kadro formatu ir CAN pagrindinio kadro formatu, kur IDE perduodamas kaip dominuojantis 11 bitų kadrų atveju ir recesyvus 29 bitų kadrų atveju. Taip pat kai kuriuos CAN valdiklius, palaikančius išplėstinio kadro formatus, galima siųsti arba priimti pranešimus bazinio kadro formatu.

Išplėstinio kadro formatas arba CAN 2.0 B
CAN protokole yra keturių tipų rėmeliai: duomenų rėmeliai, nuotoliniai rėmeliai, klaidų rėmeliai ir perkrovos rėmeliai. Duomenų rėmelyje yra perdavimo mazgo duomenų nuotolinio rėmelio užklausos dėl konkretaus identifikatoriaus perdavimo klaidos rėmelis aptinka visas mazgo klaidas ir perkrovos rėmelis įsijungia, kai sistema įveda uždelsimą tarp duomenų ar nuotolinio rėmelio. Teoriškai CAN ryšys gali susieti iki 2032 įrenginius viename tinkle, tačiau praktiškai tai apsiriboja 110 mazgų dėl aparatūros siųstuvų-imtuvų. Jis palaiko laidus iki 250 metrų, kai perdavimo sparta yra 250 Kbps, o 10 bitų sparta - maksimalus 1 km ilgis, o trumpiausias - 1 Mbps - 40 metrų.
Pramonės automatika ir valdymas naudojant CAN protokolą
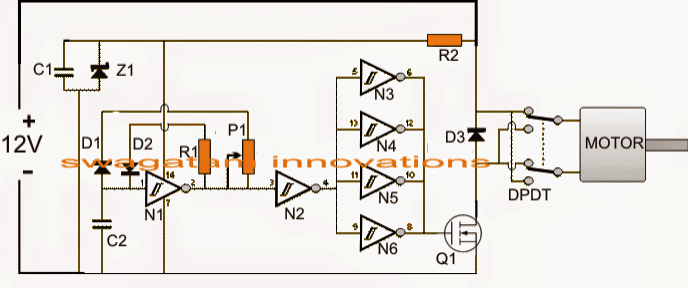
Tai projektas įgyvendinamas siekiant kontroliuoti pramoninę apkrovos, kurias valdo nuolatinės srovės variklis, atsižvelgiant į proceso temperatūros pokyčius. Įvairūs procesų valdymo sistemos yra priklauso nuo temperatūros. Tarkime, jei maišytuvo bakas - pasiekus tam tikrą temperatūrą - nuolatinės srovės variklis turi būti įjungtas, kad suktųsi maišytuvas. Taigi šiame projekte tai pasiekiama naudojant CAN protokolą, kuris yra labai efektyvus ir patikimas pigių ryšių palaikymas.
Šiame projekte naudojami du mikrovaldikliai, vienas temperatūros duomenims gauti, kitas - valdantis nuolatinės srovės variklį . CAN valdiklis MCP2515 ir CAN siųstuvas-imtuvas MCP2551 yra prijungti prie abiejų mikrovaldiklių, kad būtų galima įgyvendinti CAN ryšį keičiantis duomenimis.

Pramonės automatika ir valdymas naudojant CAN protokolą
Perduodantis šoninis mikrovaldiklis nuolat stebi temperatūras naudodamas LM35 temperatūros jutiklis konvertuojant analogines vertes į skaitmenines su prie jos prijungtu ADC. Šios vertės lyginamos su nustatytomis vertėmis, užprogramuotomis mikrovaldiklyje, ir šios vertės pažeidžiamos, kai mikrovaldiklis siunčia arba perduoda duomenis imtuvui šoninis mikrovaldiklis CAN valdikliu ir imtuvu.
Gaunančios pusės CAN ryšys priima duomenis ir perduoda juos mikrovaldikliui, kuris toliau apdoroja duomenis ir valdo nuolatinės srovės variklį variklio-vairuotojo IC. Taip pat galima pakeisti variklio kryptį su mikrovaldiklio valdomu vairuotojo IC.
Taigi CAN protokolas leidžia bendrauti tarpusavyje, sujungiant skirtingus mazgus pramoninėje aplinkoje. Šis komunikacijos tipas gali būti įgyvendinamas ir kituose automatizavimo sistemos, tokios kaip namai ar pastatas , gamykla ir kt. Tikimės, kad šis straipsnis galėjo geriau suprasti pramonės automatizavimą naudojant CAN ryšį. Parašykite mums, jei norite gauti daugiau informacijos ir klausimų.
Nuotraukų kreditai:
- Pramonės automatika ir valdymas wlimg
- Pramonės automatikos architektūra siemens
- Atvirų sistemų sujungimo (OSI) modelis valgyti
- CAN protokolo duomenų perdavimas can-cia
- Standartinis arba pagrindinio kadro formatas arba CAN 2.0 A iki technologyuk
- Išplėstinis kadrų formatas arba CAN 2.0 B iki plačiajuosčio ryšio










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}