Ši robotų rankos grandinė, kurią taip pat galima įgyvendinti kaip robotinį kraną, veikia naudojant 6 servovariklius ir gali būti valdoma per mikrovaldiklio nuotolinis valdymas , naudojant „Arduino“ pagrįstą 2,4 GHz ryšio jungtį.
Pagrindinės funkcijos
Kai kuriate kažką tokio rafinuoto kaip robotų ranka, jis turi atrodyti moderniai ir turi apimti daug pažangių funkcijų, o ne tik paprastą žaislą, pvz., Funkcijas.
Siūlomą visavertį dizainą palyginti lengva pastatyti, tačiau jis priskiriamas kai kurioms pažangioms manevravimo funkcijoms, kurias būtų galima tiksliai valdyti belaidžiu ar nuotoliniu būdu valdomomis komandomis. Dizainas netgi tinka pramoniniam naudojimui, jei varikliai yra tinkamai patobulinti.
Pagrindinės šio mechaninio krano, pavyzdžiui, robotinės rankos, savybės yra šios:
- Nuolat reguliuojama „ranka“ virš 180 laipsnių vertikalios ašies.
- Nuolat reguliuojama „alkūnė“ per 180 laipsnių vertikalią ašį.
- Nuolat reguliuojamas „piršto prispaudimas“ arba „Grip“ per 90 laipsnių vertikalią ašį.
- Nuolat reguliuojama „ranka“ per 180 laipsnių horizontalią plokštumą.
- Visa robotų sistema arba krano rankena yra judama ir manevringa kaip a nuotoliniu būdu valdomas automobilis .
Grubus darbo modeliavimas
Keletą iš aukščiau paaiškintų funkcijų galima peržiūrėti ir suprasti naudojant šį GIF modeliavimą:

Variklio mechanizmo padėtis
Šis paveikslėlis suteikia mums aiškų vaizdą apie įvairias variklio padėtis ir susijusius pavarų mechanizmus, kuriuos reikia sumontuoti įgyvendinant projektą:

Šioje konstrukcijoje mes stengiamės, kad viskas būtų kuo paprasčiau, kad net profanas galėtų suprasti susijusius variklio / pavarų mechanizmus. ir niekas nelieka pasislėpęs už sudėtingų mechanizmų.
Kiekvieno variklio veikimą ar funkciją galima suprasti naudojant šiuos punktus:
- Variklis Nr. 1 valdo roboto „piršto suspaudimą“ arba sugriebimo sistemą. Judamasis elementas yra tiesiogiai sujungtas su variklio velenu.
- 2 variklis valdo sistemos alkūnės mechanizmą. Jis sukonfigūruotas su paprasta krašto pavarų dėže, skirta kėlimo judesiui įgyvendinti.
- 3 variklis yra atsakingas už visos robotų rankos sistemos pakėlimą vertikaliai, todėl šis variklis turi būti galingesnis nei pirmiau minėti du. Šis variklis taip pat yra integruotas naudojant pavarų mechanizmą reikalingiems veiksmams atlikti.
- Variklis Nr. 4 valdo visą krano mechanizmą per visą 360 laipsnių horizontalią plokštumą, kad ranka galėtų pasirinkti ar pakelti bet kokį daiktą per visą pagal arba prieš laikrodžio rodyklę radialinis diapazonas.
- 5 ir 6 varikliai veikia kaip platformos ratai, pernešantys visą sistemą. Šiuos variklius galima valdyti be pastangų perkeliant sistemą iš vienos vietos į kitą, be to, tai palengvina sistemos judėjimą rytų / vakarų, šiaurės / pietų kryptimi paprasčiausiai reguliuojant kairiųjų / dešiniųjų variklių greitį. Tai paprasčiausiai daroma sumažinus arba sustabdžius vieną iš dviejų variklių, pavyzdžiui, norint pradėti posūkį dešinėje pusėje, dešinės pusės variklis gali būti sustabdytas arba sustabdytas, kol posūkis bus įvykdytas iki galo arba iki norimo kampo. Panašiai, norėdami pradėti posūkį į kairę, darykite tą patį su kairiuoju varikliu.
Galinis ratas neturi jokio variklio, jis yra su vyriu, kad laisvai judėtų savo centrine ašimi ir vykdytų priekinių ratų manevrus.
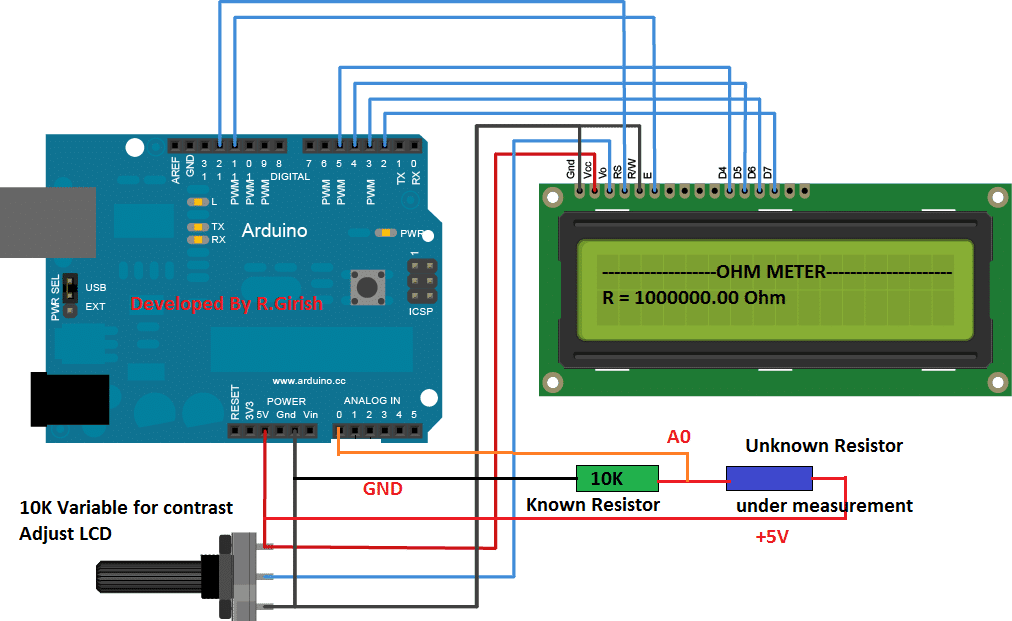
Belaidžio imtuvo grandinė
Kadangi visa sistema sukurta darbui su nuotolinio valdymo pultu, belaidį imtuvą reikia sukonfigūruoti aukščiau paaiškintais varikliais. Tai gali būti padaryta naudojant šią „Arduino“ pagrįstą grandinę.

Kaip matote, prie „Arduino“ išėjimų yra pritvirtinti 6 servovarikliai ir kiekvienas iš jų valdomas per nuotolinio valdymo signalus, kuriuos užfiksuoja prijungtas jutiklis NRF24L01.
Signalas apdorojamas šiuo jutikliu ir tiekiamas „Arduino“, kuris apdoroja atitinkamą variklį numatytoms greičio valdymo operacijoms.
Signalai siunčiami iš siųstuvo grandinės, turinčios potenciometrus. Šių potenciometrų reguliavimas reguliuoja greitį atitinkančių variklių, pritvirtintų aukščiau paaiškinta imtuvo grandine, greičio lygius.
Dabar pažiūrėkime, kaip atrodo siųstuvo grandinė:
Siųstuvo modulis

Siųstuvo dizainą galima pamatyti su 6 potenciometru, pritvirtintu prie „Arduino“ plokštės, taip pat su kitu 2,4 GHz ryšio ryšio įrenginiu.
Kiekvienas iš puodų yra užprogramuotas valdant atitinkamą variklį susietas su imtuvo grandine. Todėl vartotojui sukant pasirinkto siųstuvo potenciometro ašį, atitinkamas roboto rankos variklis pradeda judėti ir įgyvendinti veiksmus, priklausomai nuo jo konkrečios padėties sistemoje.
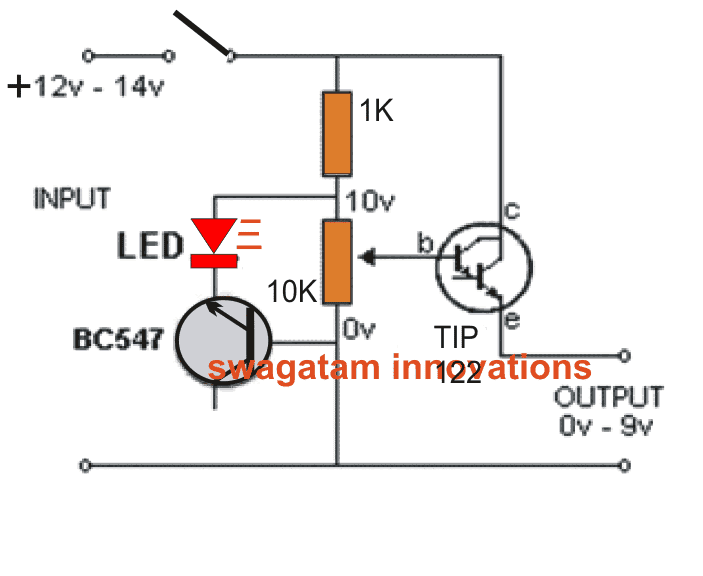
Variklio perkrovos valdymas
Jums gali kilti klausimas, kaip varikliai riboja jų judėjimą per judamą diapazoną, nes sistemoje nėra jokių ribojančių elementų, užkertančių kelią variklio perkrovai, kai atitinkami mechanizmo judesiai pasiekia savo pabaigos taškus?
Reiškia, pavyzdžiui, kas nutiks, jei variklis nebus sustabdytas net ir tada, kai „sukibimas“ tvirtai laikys objektą?
Lengviausias sprendimas yra pridėti asmenį srovės valdymo moduliai su kiekvienu varikliu, kad tokiose situacijose variklis liktų įjungtas ir užrakintas nedegant ir neperkraunant.
Dėl aktyvaus srovės valdymo varikliai nepatiria perkrovos ar per didelės srovės sąlygų, todėl jie toliau dirba nustatytame saugiame diapazone.
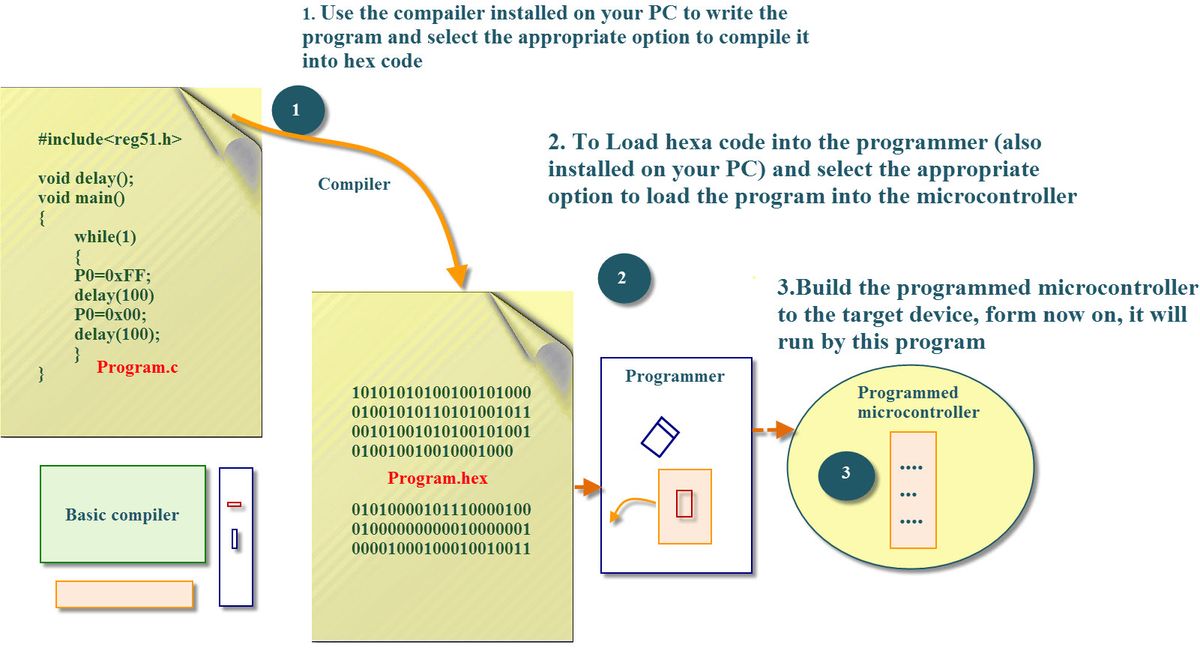
Galite rasti visą programos kodą šiame straipsnyje
Pora: USB 5V garso stiprintuvas kompiuterio garsiakalbiams Kitas: ištirtos 7 modifikuotos sinusinės bangos keitiklio grandinės - nuo 100 W iki 3 kVA

![Atmosferos slėgio indikatoriaus grandinė [LED barometro grandinė]](https://electronics.jf-parede.pt/img/3-phase-power/40/atmospheric-pressure-indicator-circuit-led-barometer-circuit-1.jpg)