Tačiau procesas visada išsaugo santykį P = I x V, o tai reiškia, kad kai keitiklio išvestis padidina įėjimo įtampą, išėjime proporcingai sumažėja srovė, dėl kurios išėjimo galia beveik visada lygi įėjimui galia arba mažesnė už įvesties galią.
Kaip veikia „Boost Converter“
Padidinimo keitiklis yra tam tikras SMPS arba jungiklio režimo maitinimo šaltinis, kuris, siekiant didesnio efektyvumo, iš esmės veikia su dviem aktyviaisiais puslaidininkiais (tranzistoriumi ir diodu) ir su mažiausiai vienu pasyviuoju komponentu kondensatoriaus ar induktoriaus pavidalu arba abiem.Induktorius čia iš esmės naudojamas įtampai didinti, o kondensatorius įvedamas filtruojant perjungimo svyravimus ir mažinant srovės bangas keitiklio išėjime.
Įvesties maitinimo šaltinį, kurį gali reikėti padidinti ar sustiprinti, galima gauti iš bet kurio tinkamo nuolatinės srovės šaltinio, pavyzdžiui, baterijų, saulės baterijų, variklinių generatorių ir kt.
Veikimo principas
Didinimo keitiklio induktorius vaidina svarbų vaidmenį didinant įėjimo įtampą.
Esminis aspektas, kuris tampa atsakingu už induktoriaus įkrovos įtampos įjungimą, yra dėl jo būdingos savybės priešintis staiga sukeltai srovei arba priešintis, ir dėl to, kad jis reaguoja į tai sukurdamas magnetinį lauką ir vėliau sunaikindamas magnetinį srityje. Sunaikinimas veda prie sukauptos energijos išleidimo.
Šis aukščiau pateiktas procesas lemia srovės kaupimą induktoriuje ir šios išvesties sukauptos srovės atmetimą atgalinės EMF pavidalu.
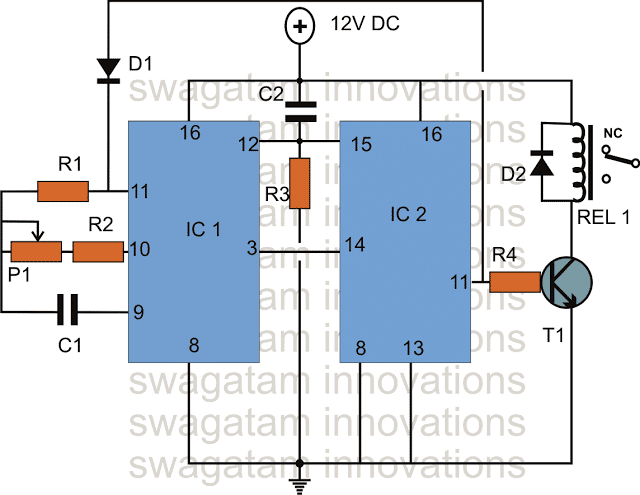
Relės tranzistoriaus tvarkyklės grandinė gali būti laikoma puikiu padidinimo keitiklio grandinės pavyzdžiu. Per relę prijungtas grįžtamasis diodas įvedamas į trumpojo jungimo atgalinius atgalinius EMF iš relės ritės ir apsaugoti tranzistorių, kai jis išsijungia.
Jei šis diodas pašalinamas ir diodo kondensatoriaus lygintuvas prijungtas prie tranzistoriaus kolektoriaus / emiterio, padidintą įtampą iš relės ritės galima surinkti per šį kondensatorių.

Didesnio keitiklio konstrukcijos procesas lemia tai, kad išėjimo įtampa visada yra didesnė už įėjimo įtampą.
„Boost Converter“ konfigūracija
Remiantis šiuo paveikslu, mes galime pamatyti standartinę padidinimo keitiklio konfigūraciją, darbo modelis gali būti suprantamas taip:Įjungus rodomą įrenginį (kuris gali būti bet kokios standartinės galios BJT arba „mosfet“), srovė iš įvesties maitinimo šaltinio patenka į induktorių ir teka pagal laikrodžio rodyklę per tranzistorių, kad užbaigtų ciklą neigiamame įėjimo tiekimo gale.

Pirmiau minėto proceso metu induktorius patiria staigų srovės įvedimą ir bando atsispirti antplūdžiui, dėl kurio susidaro tam tikras srovės kiekis generuojant magnetinį lauką.
Kitoje sekančioje sekoje, kai tranzistorius yra išjungtas, srovės laidumas nutrūksta ir vėl priverčia staigiai keisti srovės lygį induktoriuje. Induktorius į tai reaguoja atmušdamas arba atlaisvindamas sukauptą srovę. Kadangi tranzistorius yra OFF padėtyje, ši energija randa kelią per diodą D ir per parodytus išvesties gnybtus galinės EMF įtampos pavidalu.

Induktorius tai atlieka sunaikindamas anksčiau jame sukurtą magnetinį lauką, kai tranzistorius buvo įjungimo režime.
Tačiau minėtas energijos išleidimo procesas yra įgyvendinamas priešingu poliškumu, todėl įvesties maitinimo įtampa dabar tampa nuosekliai su induktoriaus atgaline emf įtampa. Ir kaip mes visi žinome, kad kai maitinimo šaltiniai jungiasi nuosekliai, jų grynoji įtampa padidėja, kad būtų pasiektas didesnis bendras rezultatas.
Tas pats atsitinka padidinimo keitiklyje per induktoriaus išlydžio režimą, sukuriant išėjimą, kuris gali būti bendras induktoriaus galinės EMF įtampos ir esamos maitinimo įtampos rezultatas, kaip parodyta aukščiau pateiktoje diagramoje
Dėl šios bendros įtampos gaunama padidinta išvestis arba padidinta išvestis, kuri patenka į kelią per diodą D ir skersinį kondensatorių C, kad galiausiai pasiektų prijungtą apkrovą.
Kondensatorius C čia vaidina gana svarbų vaidmenį, per induktoriaus išlydžio režimą kondensatorius C kaupia joje išsiskyrusią išsiskyrusią energiją, o kitoje fazėje, kai tranzistorius vėl išsijungia ir induktorius yra kaupimo režime, kondensatorius C bando išlaikyti pusiausvyrą tiekiant į krūvį savo sukauptą energiją. Žiūrėkite žemiau pateiktą paveikslą.

Tai užtikrina santykinai pastovią prijungtos apkrovos įtampą, kuri gali įgyti galią tiek tranzistoriaus įjungimo, tiek išjungimo laikotarpiais.
Jei C neįtraukta, ši funkcija atšaukiama, todėl mažesnė apkrovos galia ir mažesnis efektyvumo rodiklis.
Pirmiau paaiškintas procesas tęsiasi, kai tranzistorius įjungiamas / išjungiamas tam tikru dažniu, išlaikant padidinimo konversijos efektą.
Veikimo režimai
Didinimo keitiklį pirmiausia galima naudoti dviem režimais: nepertraukiamuoju ir pertraukiamuoju režimu.Nuolatiniu režimu induktoriaus srovei niekada neleidžiama pasiekti nulio jo iškrovimo proceso metu (kol tranzistorius yra išjungtas).
Tai atsitinka, kai tranzistoriaus įjungimo / išjungimo laikas yra nustatomas taip, kad induktorius visada būtų greitai prijungtas prie įvesties maitinimo šaltinio per įjungtą tranzistorių, kol jis negalės visiškai išsikrauti per apkrovą ir kondensatorių C.
Tai leidžia induktoriui nuolat gaminti padidinimo įtampą efektyviu greičiu.
Nenutrūkstamuoju režimu tranzistoriaus įjungimo įjungimo laikas gali būti toks platus, kad induktoriui gali būti leista visiškai iškrauti ir likti neaktyviam tarp tranzistoriaus įjungimo periodų, sukuriant didžiulę banginę įtampą per apkrovą ir kondensatorių C.
Tai galėtų padaryti produkciją mažiau efektyvią ir esant didesniam svyravimui.
Geriausias būdas yra apskaičiuoti tranzistoriaus įjungimo / išjungimo laiką, kuris suteikia didžiausią stabilią įtampą išėjime, o tai reiškia, kad turime įsitikinti, kad induktorius yra optimaliai įjungtas taip, kad jis nebūtų įjungtas per greitai, o tai gali neleisti jam išsikrauti optimaliai ir jo neįjunkite labai vėlai, o tai gali išeikvoti neefektyvų tašką.
Skaičiavimas, induktyvumas, srovė, įtampa ir darbo ciklas padidinimo keitiklyje
Čia aptarsime tik nuolatinį režimą, kuris yra tinkamiausias būdas naudoti padidinimo keitiklį, įvertinkime skaičiavimus, susijusius su padidinimo keitikliu nepertraukiamu režimu:Kai tranzistorius yra įjungtos fazės metu, įėjimo šaltinio įtampa (
 ) yra naudojamas visame induktoriuje, sukeldamas srovę (
) yra naudojamas visame induktoriuje, sukeldamas srovę (  ) kaupiasi per induktorių tam tikrą laiką, žymimą (t). Tai galima išreikšti šia formule:
) kaupiasi per induktorių tam tikrą laiką, žymimą (t). Tai galima išreikšti šia formule: ΔIL / Δt = Vt / L
Tuo metu, kai tranzistoriaus įjungta būsena baigsis, o tranzistorius bus išjungtas, srovę, kuri turėtų kauptis induktoriuje, galima pateikti pagal šią formulę:
ΔIL (įjungta) = 1 / L 0ʃDT
arba
Plotis = DT (Vi) / L
Kur D yra darbo ciklas. Norėdami suprasti jo apibrėžimą, galite kreiptis į mūsų ankstesnį b Susiję straipsniai
L žymi induktoriaus induktyvumo reikšmę Henryje.
Dabar, kai tranzistorius yra išjungtoje būsenoje, ir, jei manysime, kad diodas siūlo mažiausią įtampos kritimą per jį, o kondensatorius C yra pakankamai didelis, kad būtų galima pagaminti beveik pastovią išėjimo įtampą, tada išėjimo srovė (
) galima išskaityti šios išraiškos pagalba Vi - Vo = LdI / dt
Be to, dabartiniai variantai (
), kuris gali atsirasti per induktorių jo iškrovos laikotarpiu (tranzistoriaus išjungimo būsena), galima pateikti kaip: ΔIL (išjungta) = 1 / L x DTʃT (Vi - Vo) dt / L = (Vi - Vo) (1 - D) T / L
Darant prielaidą, kad keitiklis gali veikti santykinai pastoviomis sąlygomis, galima manyti, kad srovė arba induktoriaus viduje per visą komutacijos (perjungimo) ciklą sukaupta energija yra pastovi arba identiška, tai galima išreikšti taip:
E = ½ L x 2IL
Tai taip pat reiškia, kad, kadangi srovė per visą komutacijos laikotarpį arba ON būsenos pradžioje ir OFF būsenos pabaigoje turėtų būti identiška, jų gaunama dabartinio lygio pokyčio vertė turėtų būti lygi nuliui, išreikštas žemiau:
ΔIL (įjungta) + ΔIL (išjungta) = 0
Jei aukščiau pateiktoje formulėje pakeisime ΔIL (įjungta) ir ΔIL (išjungta) reikšmes iš ankstesnių darinių, gausime:
IL (įjungta) - ΔIL (išjungta) = Vidt / L + (Vi - Vo) (1 - D) T / L = 0
Toliau supaprastinus gaunamas toks rezultatas: Vo / Vi = 1 / (1 - D)
arba
Vo = Vi / (1 - D)
Ankstesnė išraiška aiškiai nurodo, kad padidinimo keitiklio išėjimo įtampa visada bus didesnė už įvesties maitinimo įtampą (per visą darbo ciklo diapazoną nuo 0 iki 1)
Maišydami terminus abiejose pusėse aukščiau pateiktoje lygtyje, gauname lygtį, kaip nustatyti darbo ciklą padidinimo keitiklio darbo cikle.
D = 1 - Vo / Vi
Pirmiau pateikti vertinimai suteikia mums įvairių formulių, skirtų nustatyti skirtingus parametrus, susijusius su padidinimo keitiklio operacijomis, kurias galima efektyviai naudoti apskaičiuojant ir optimizuojant tikslų padidinimo keitiklio dizainą.
Apskaičiuokite „Boost Converter“ galios lygį
Norint apskaičiuoti padidinimo keitiklio galios lygį, būtinos šios 4 gairės:
1. Įvesties įtampos diapazonas: Vin (min.) Ir Vin (maks.)
2. Minimali išėjimo įtampa: Vout
3. Didžiausia išėjimo srovė: Iout (maks.)
4. IC grandinė, naudojama kuriant keitiklį.
Tai dažnai yra privaloma vien dėl to, kad turėtų būti atliekami tam tikri skaičiavimų planai, kurie gali būti nepaminėti duomenų lape.
Tuo atveju, kai šie apribojimai yra įprasti, galios pakopos aproksimavimas yra įprastas
vyksta.
Vertinant didžiausią perjungimo srovę
Pagrindinis žingsnis nustatant perjungimo srovę būtų išsiaiškinti minimalios įėjimo įtampos darbo ciklą D. Plika minimali įėjimo įtampa naudojama daugiausia todėl, kad tai lemia didžiausią jungiklio srovę.
D = 1 - {Vin (min) x n} / Vout ---------- (1)
Vin (min) = mažiausia įėjimo įtampa
Vout = reikalinga išėjimo įtampa
n = keitiklio efektyvumas, pvz. numatoma vertė gali būti 80%
Efektyvumas yra apskaičiuojamas darbo ciklo metu vien todėl, kad keitiklis taip pat turi pateikti energijos išsklaidymą. Šis įvertinimas siūlo protingesnį darbo ciklą, palyginti su formule be efektyvumo koeficiento.
Turime leisti leisti 80% toleranciją (tai gali būti nepraktiška norint padidinti)
keitiklio blogiausio atvejo efektyvumas), turėtų būti apsvarstyta arba galbūt žiūrėkite pasirinkto keitiklio duomenų lapo dalį Įprastinės savybės
Skaičiuojant bangų srovę
Paskesnis didžiausios perjungimo srovės apskaičiavimo veiksmas būtų išsiaiškinti induktoriaus pulsacijos srovę.
Keitiklio duomenų lape paprastai nurodomas konkretus induktorius arba įvairūs induktoriai, dirbantys su IC. Todėl, norėdami apskaičiuoti pulsacijos srovę, turime naudoti siūlomą induktoriaus vertę, jei duomenų lape nėra nieko, kas apskaičiuota induktorių sąraše.
S šios programos pastabos, skirtos apskaičiuoti padidinimo keitiklio galios lygį, rinkimas.
Delta I (l) = {Vin (min) x D} / f (s) x L ---------- (2)
Vin (min) = mažiausia įėjimo įtampa
D = darbo ciklas, matuojamas 1 lygtimi
f (s) = mažiausias keitiklio perjungimo dažnis
L = pageidaujama induktoriaus vertė
Vėliau reikia nustatyti, ar pageidaujamas IC gali pateikti optimalų išėjimą
srovė.
Iout (maks.) = [I lim (min) - Delta I (l) / 2] x (1 - D) ---------- (3)
I lim (min) = minimali vertė
dabartinis jungiklio apribojimas (paryškintas duomenyse
lapas)
Delta I (l) = induktoriaus pulsacijos srovė, išmatuota ankstesnėje lygtyje
D = darbo ciklas, apskaičiuotas pagal pirmąją lygtį
Jei apskaičiuota optimalaus išėjimo srovės vertė, nustatyta IC, Iout (max), yra mažesnė už numatomą sistemos didžiausią išėjimo srovę, tikrai reikia naudoti alternatyvų IC su šiek tiek didesne jungiklio srovės valdymu.
Su sąlyga, kad išmatuota „Iout“ (max) vertė tikriausiai yra mažesnė nei tikėtasi, galite naudoti įdarbintą IC su didesnio induktyvumo induktoriumi, kai jis vis dar yra nustatytoje serijoje. Didesnis induktyvumas sumažina pulsacijos srovę, todėl padidina maksimalią išėjimo srovę su konkrečiu IC.
Jei nustatyta vertė viršija geriausią programos išėjimo srovę, apskaičiuojama didžiausia įrangos jungiklio srovė:
Isw (max) = Delta I (L) / 2 + Iout (max) / (1 - D) --------- (4)
Delta I (L) = induktoriaus pulsacijos srovė, išmatuota antrąja lygtimi
Iout (max), = optimali išėjimo srovė, būtina naudingumui
D = darbo ciklas, išmatuotas anksčiau
Iš tikrųjų tai yra optimali srovė, induktorius, uždaras jungiklis (-iai) be išorinio diodo, turi atsistoti.
Induktoriaus pasirinkimas
Kartais duomenų lapuose pateikiama daugybė patariamų induktoriaus verčių. Jei tokia situacija, norėsite teikti pirmenybę induktoriui su šiuo diapazonu. Kuo didesnė induktoriaus vertė, tuo didesnė yra didžiausia išėjimo srovė daugiausia dėl sumažėjusios pulsacijos srovės.
Sumažinta induktoriaus vertė, sumažinta yra tirpalo dydis. Turėkite omenyje, kad induktorius visada turėtų turėti geresnį srovės lygį, palyginti su didžiausia srove, nurodyta 4 lygtyje, dėl to, kad srovė pagreitėja mažinant induktyvumą.
Elementams, kuriuose nėra induktoriaus diapazono ls, šis paveikslėlis pateikia patikimą tinkamo induktoriaus skaičiavimą
L = Vin x (Vout - Vin) / Delta I (L) x f (s) x Vout --------- (5)
Vin = standartinė įėjimo įtampa
Vout = pageidaujama išėjimo įtampa
f (s) = minimalus keitiklio perjungimo dažnis
I delta (L) = projektuojama induktoriaus pulsacijos srovė, stebėkite toliau:
Induktoriaus pulsacijos srovės paprasčiausiai negalima išmatuoti pagal pirmąją lygtį, vien todėl, kad induktoriaus ls neatpažįstamas. Induktoriaus bangavimo srovės garso apytikslė vertė yra nuo 20% iki 40% išėjimo srovės.
Delta I (L) = (nuo 0,2 iki 0,4) x Iout (maks.) X Vout / Vin ---------- (6)
Delta I (L) = projektuojama induktoriaus pulsacijos srovė
Iout (max) = optimali išvestis
srovė, reikalinga programai
Lygintuvo diodo nustatymas
Norint sumažinti nuostolius, „Schottky“ diodus tikrai reikia laikyti geru pasirinkimu.
Laikoma, kad būtinas išankstinis srovės reitingas yra lygus didžiausiai išėjimo srovei:
I (f) = Iout (maks.) ---------- (7)
I (f) = tipinis
priekinė lygintuvo diodo srovė
Iout (max) = optimali išėjimo srovė, svarbi programoje
„Schottky“ diodai turi žymiai daugiau didžiausios srovės įvertinimo, palyginti su įprastu reitingu. Štai kodėl padidėjusi piko srovė programoje nėra didelis rūpestis.
Antrasis parametras, kurį reikia stebėti, yra diodo galios išsiskyrimas. Tai susideda iš:
P (d) = I (f) x V (f) ---------- (8)
I (f) = vidutinė priekinė lygintuvo diodo srovė
V (f) = lygintuvo diodo priekinė įtampa
Išėjimo įtampos nustatymas
Dauguma keitiklių paskirsto išėjimo įtampą naudodami varžinį skirstomąjį tinklą (kuris galėtų būti įmontuotasar jie turėtų būti stacionarūs išėjimo įtampos keitikliai).
Esant priskirtai grįžtamojo ryšio įtampai V (fb) ir grįžtamojo ryšio poslinkio srovei I (fb), įtampos daliklis paprastai būna
apskaičiuota.

Srovė, naudojant varžinį daliklį, gali būti maždaug šimtą kartų masyvesnė už grįžtamojo ryšio šališkumo srovę:
I (r1 / 2)> arba = 100 x I (fb) ---------- (9)
I (r1 / 2) = srovė rezistinio daliklio į GND eigoje
I (fb) = grįžtamojo ryšio šališkumas iš duomenų lapo
Tai padidina mažesnį nei 1% įtampos vertinimo netikslumą. Srovė papildomai yra žymiai didesnė.
Pagrindinė mažesnių rezistorių verčių problema yra padidėjęs varžos daliklio galios nuostolis, išskyrus tai, kad aktualumas gali būti šiek tiek padidėjęs.
Remiantis aukščiau nurodytu įsitikinimu, rezistoriai yra sukurti taip, kaip nurodyta toliau:
R2 = V (fb) / I (r1 / 2) ---------- (10)
R1 = R2 x [Vout / V (fb) - 1] ---------- (11)
R1, R2 = varžinis daliklis.
V (fb) = grįžtamoji įtampa iš duomenų lapo
I (r1 / 2) = srovė dėl varžos daliklio į GND, nustatyta 9 lygtyje
Vout = planuojama išėjimo įtampa
Įvesties kondensatoriaus pasirinkimas
Mažiausia įvesties kondensatoriaus vertė paprastai pateikiama duomenų lape. Ši mažiausia vertė yra gyvybiškai svarbi pastoviai įvesties įtampai, atsirandančiai dėl persijungiančio maitinimo šaltinio didžiausios srovės.
Tinkamiausias būdas yra naudoti sumažinto ekvivalentinio serijos varžos (ESR) keraminius kondensatorius.
Dielektrinis elementas turi būti X5R arba didesnis. Priešingu atveju kondensatorius dėl nuolatinės srovės šališkumo ar temperatūros gali nutraukti didžiąją savo talpos dalį (žr. 7 ir 8 nuorodas).
Vertę iš tikrųjų galima padidinti, jei galbūt įėjimo įtampa yra triukšminga.
Išvesties kondensatoriaus pasirinkimas
Geriausias būdas yra surasti mažus ESR kondensatorius, kad sumažėtų išėjimo įtampos bangavimas. Keraminiai kondensatoriai yra tinkami tipai, kai dielektrinis elementas yra X5R tipo arba efektyvesnisTuo atveju, kai keitiklis turi išorinę kompensaciją, gali būti taikoma bet kokia kondensatoriaus vertė, viršijanti siūlomą mažiausią duomenų lape, tačiau kažkaip reikia pakeisti pasirinktos išėjimo talpos kompensaciją.
Naudojant viduje kompensuojamus keitiklius, reikia įpratinti induktoriaus ir kondensatoriaus reikšmes arba duomenų lentelėje pateiktą informaciją, skirtą išvesties kondensatoriams pritaikyti, galima pritaikyti santykiu L x C.
Naudojant antrinę kompensaciją, šios lygtys gali padėti reguliuoti išvesties kondensatoriaus vertes planuojamai išėjimo įtampos bangai:
Cout (min.) = Iout (maks.) X D / f (s) x „Delta Vout“ ---------- (12)
Cout (min) = mažiausia išėjimo talpa
Iout (max) = optimali naudojimo išėjimo srovė
D = darbo ciklas, apskaičiuotas pagal 1 lygtį
f (s) = mažiausias keitiklio perjungimo dažnis
Delta Vout = ideali išėjimo įtampos bangavimas
Išvesties kondensatoriaus ESR padidina brūkšnį daugiau bangų, iš anksto priskirtų lygčiai:
„Delta Vout“ (ESR) = ESR x [Iout (maks.) / 1 -D + Delta I (l) / 2] ---------- (13)
„Delta Vout“ (ESR) = alternatyvios išėjimo įtampos bangavimas, atsirandantis dėl kondensatorių ESR
ESR = ekvivalentinė naudojamo išėjimo kondensatoriaus nuoseklioji varža
Iout (max) = didžiausia išėjimo srovė
D = darbo ciklas, apskaičiuotas pirmojoje lygtyje
Delta I (l) = induktoriaus pulsacijos srovė iš 2 arba 6 lygties
Lygtys, skirtos įvertinti „Boost“ keitiklio galios lygį
Maksimalus darbo ciklas: D = 1 - vynas (min.) X n / Vout ---------- (14)
Vin (min) = mažiausia įėjimo įtampa
Vout = numatoma išėjimo įtampa
n = keitiklio efektyvumas, pvz. manoma, kad 85 proc.
Induktoriaus bangų srovė:
I delta (l) = Vin (min) x D / f (s) x L ---------- (15)
Vin (min) = mažiausia įėjimo įtampa
D = darbo ciklas, nustatytas 14 lygtyje
f (s) = vardinis keitiklio perjungimo dažnis
L = nurodyta induktoriaus vertė
Maksimali paskirto IC išėjimo srovė:
Iout (maks.) = [Ilim (min) - Delta I (l)] x (1 - D) ---------- (16)Ilim (min) = mažiausia integralinės raganos dabartinės ribos vertė (siūloma duomenų lape)
Delta I (l) = induktoriaus pulsacijos srovė, nustatyta 15 lygtyje
D = darbo ciklas, apskaičiuotas pagal 14 lygtį
Konkrečios programos maksimali jungiklio srovė:
Isw (max) = Delta I (l) / 2 + Iout (max) / (1 - D) ---------- (17)Delta I (l) = induktoriaus pulsacijos srovė, apskaičiuota 15 lygtyje
Iout (max), = didžiausia galima išėjimo srovė, reikalinga naudingumui
D = darbo ciklas, apskaičiuotas 14 lygtyje
Induktoriaus priartinimas:
L = Vin x (Vout - Vin) / Delta I (l) x f (s) x Vout ---------- (18)Vin = bendra įėjimo įtampa
Vout = planuojama išėjimo įtampa
f (s) = mažiausias keitiklio perjungimo dažnis
Delta I (l) = projektuojama induktoriaus pulsacijos srovė, žr. 19 lygtį
Induktoriaus bangų srovės vertinimas:
I delta (l) = (nuo 0,2 iki 0,4) x Iout (maks.) X Vout / Vin ---------- (19)Delta I (l) = projektuojama induktoriaus pulsacijos srovė
Iout (max) = didžiausia išėjimo srovė, svarbi naudojimui
Tipinė lygintuvo diodo priekinė srovė:
I (f) = Iout (maks.) ---------- (20)
Iout (max) = optimali išėjimo srovė, tinkama naudingumui
Galios išsklaidymas lygintuvo diode:
P (d) = I (f)
x V (f) ---------- (21)
I (f) = lygintuvo diodo tipinė priekinė srovė
V (f) = lygintuvo diodo priekinė įtampa
Srovė, naudojant išėjimo įtampos padėties nustatymą naudojant varžos skirstytuvo tinklą:
I (r1 / 2)> arba = 100 x I (fb) ---------- (22)I (fb) = grįžtamojo ryšio šališkumas iš duomenų lapo
Rezistoriaus vertė tarp FB kaiščio ir GND:
R2 = V (fb) / I (r1 / 2) ---------- (23)
Rezistoriaus vertė tarp FB kaiščio ir Vout:
R1 = R2 x [Vout / V (fb) - 1] ---------- (24)
V (fb) = grįžtamoji įtampa iš duomenų lapo
I (r1 / 2) = srovė
dėl varžinio daliklio į GND, išsiaiškinto 22 lygtyje
Vout = ieškoma išėjimo įtampa
Mažiausias išėjimo pajėgumas, kitaip iš anksto nustatytas duomenų lape:
Cout (min) = Iout (maks.) X D / f (s) x Delta I (l) ---------- (25)
Iout (max) = didžiausia įmanoma programos išėjimo srovė
D = darbo ciklas, apskaičiuotas 14 lygtyje
f (s) = mažiausias keitiklio perjungimo dažnis
Delta Vout = laukiama išėjimo įtampos bangavimas
Perteklinis išėjimo įtampos bangavimas dėl ESR:
„Delta Vout“ (esr) = ESR x [Iout (maks.) / (1 - D) + Delta I (l) / 2 ---------- (26)
ESR = naudojamo išėjimo kondensatoriaus lygiagreti nuoseklioji varža
Iout (max) = optimali naudojimo išėjimo srovė
D = darbo ciklas, nustatytas 14 lygtyje
Delta I (l) = induktoriaus pulsacijos srovė iš 15 arba 19 lygties
Pora: Padarykite šį elektrinį paspirtuką / rikša Kitas: „Buck Boost“ keitiklių induktorių skaičiavimas