Šioje eroje pramoninė automatika , robotai naudojami įvairiems procesams valdyti, siekiant tikslios ir geresnės gamybos kokybės. Kuriant robotą, ypač pramonės šakai, visada yra sudėtinga užduotis pasirinkti idealų variklį tobulam robotui. Tinkamas parinkimas elektros varikliai pramoniniuose robotuose reikia kelių parametrų, kad būtų atsižvelgta į rankos valdymą, padėtį, kampinius ir tiesinius judesius.

Pramoninėje robotikoje naudojami varikliai
Variklio pasirinkimas yra mažiausiai suprantama robotikos mėgėjų koncepcija, kuriai reikalinga strategija ir rimta analizė. Tai apima nustatant roboto greitį, pagreitį, sukimo momento reikalavimus, atsižvelgiant į roboto svorį, rato dydį ir pritaikymą, kur jis turi būti įgyvendintas. Yra daugybė variklių tipų. yra šiandieninėje rinkoje, tačiau dažniausiai „Tiny pager“ varikliai, servo varikliai , linijiniai varikliai, žingsniniai varikliai ir nuolatinės srovės varikliai naudojami pramoniniuose robotuose pagal jų taikymo sritį.
Neteisingai pasirinkus variklį gaunamas neįgalus robotas, todėl koks variklis yra geriausias ir tinkamas, kad pramoniniai robotai būtų tikri, tikslūs ir pakankami tenkinti visus pramoninių procesų poreikius, turint omenyje visas tikroviškas specifikacijas?
Čia mes surinkome keletą įžvalgų apie šį variklį iš pramonės profesionalų, norėdami pasirinkti atitinkamą variklį, kuris bus pasirinktas pramoninėms reikmėms.
Mes raginame jus vadovautis ekspertų nuomonėmis, kurių tikslas - pateikti geriausius pramoninės robotikos variklius su turimais nuolatinės srovės, žingsniniais, be šepetėlių ir servovarikliais, kad robotas galėtų judėti tiksliai, ekonomiškai ir patikimai.
Ch.Sampathas Kumaras
M.tech VLSI dizaino srityje
Techninio turinio rašytojas
 Nuolatinės srovės varikliai gali būti platų diapazonų, kad būtų galima nuolat dirbti, tačiau tam reikia reduktoriaus reduktorių, kad tiktų atitinkamai paskirčiai. Žingsninis variklis nereikalauja reduktoriaus reduktoriaus, nes jo laipsniškas veikimas užtikrina mažą greitį nurodytoms programoms. Pagaliau servovarikliai naudojami tiksliam ir tiksliam valdymui, kuris įgyvendinamas uždaro ciklo operacijose. Tačiau tam reikia papildomų atsiliepimų ir vairavimo schemų, todėl jis yra brangus nei nuolatinės srovės ir žingsninis variklis. Taigi servo varikliai padaro robotą patikimesnį dėl tikslaus jo judėjimo.
Nuolatinės srovės varikliai gali būti platų diapazonų, kad būtų galima nuolat dirbti, tačiau tam reikia reduktoriaus reduktorių, kad tiktų atitinkamai paskirčiai. Žingsninis variklis nereikalauja reduktoriaus reduktoriaus, nes jo laipsniškas veikimas užtikrina mažą greitį nurodytoms programoms. Pagaliau servovarikliai naudojami tiksliam ir tiksliam valdymui, kuris įgyvendinamas uždaro ciklo operacijose. Tačiau tam reikia papildomų atsiliepimų ir vairavimo schemų, todėl jis yra brangus nei nuolatinės srovės ir žingsninis variklis. Taigi servo varikliai padaro robotą patikimesnį dėl tikslaus jo judėjimo.
Viswanathas Prathapas
M.Tech elektros energetikos srityje
Techninio turinio rašytojas

Pasirinkimas ir padėjimas Robotai paprastai būna pramonės šakose, kad pasirinktų objektą iš vienos vietos ar vietos ir padėtų jį kitoje vietoje. Šiuo tikslu reikia kontroliuoti robotų jungčių kampinius judesius, kuriuos galima pasiekti naudojant servovariklius. Šie servovarikliai valdomi naudojant robotų valdiklio pateiktus PWM duomenis robotų sąnariams įjungti. Servo varikliai sugeba sukurti pakankamai sukimo momentą, kad objektas greitai judėtų iš sustojimo padėties. Taigi jie naudojami kaip ratai karinėse ir pramoninėse robotinėse transporto priemonėse. Stepper varikliai taip pat gali būti naudojami padėčiai valdyti, tačiau jie net ir poilsio metu sunaudos energiją, kad tik užfiksuotų ir išlaikytų komandą. Taigi, servovarikliai paprastai naudojami pramoninėje robotikoje kaip didelio našumo pakopiniai žingsniniai varikliai.
S. Nareshas Reddy
M.tech įterptojoje sistemoje
Projekto vadovas
Mechaninio roboto struktūra turi būti kontroliuojama pagal perfo  rm užduotis. Yra trys skirtingi roboto valdymo etapai, tokie kaip suvokimas, apdorojimas ir veiksmas. Jutikliai pateikia robotui informaciją apie jo sąnarių padėtį ir galinį efektą, tada ši informacija apdorojama valdymo blokui ir apskaičiuojamas atitinkamas signalas mechaniškai judančiam varikliui. Didžioji dauguma robotų naudoja elektrinius variklius. Nešiojamuose robotuose nuolat naudojami be šepetėlių ir šepečiais nuolatinės srovės varikliai, o pramoniniuose - kintamosios srovės varikliai. Šiems varikliams pirmenybė teikiama sistemose su mažesnėmis apkrovomis ir ten, kur vyrauja judėjimo forma.
rm užduotis. Yra trys skirtingi roboto valdymo etapai, tokie kaip suvokimas, apdorojimas ir veiksmas. Jutikliai pateikia robotui informaciją apie jo sąnarių padėtį ir galinį efektą, tada ši informacija apdorojama valdymo blokui ir apskaičiuojamas atitinkamas signalas mechaniškai judančiam varikliui. Didžioji dauguma robotų naudoja elektrinius variklius. Nešiojamuose robotuose nuolat naudojami be šepetėlių ir šepečiais nuolatinės srovės varikliai, o pramoniniuose - kintamosios srovės varikliai. Šiems varikliams pirmenybė teikiama sistemose su mažesnėmis apkrovomis ir ten, kur vyrauja judėjimo forma.
Suresh Megaji
M. technika bevielio ryšio sistemose
Techninio turinio rašytojas

Jei norite dalyvauti „robotikoje“ ir pritaikyti ją „pramonei“, turėtumėte žinoti apie „variklius“, naudojamus robotikoje, nes robotika daugiausia priklauso nuo variklių. Iš esmės „robotinės mašinos“ naudojamos skirtingoms gamybos sritims. Skirtingi „varikliai“, tokie kaip nuolatinės srovės, impulsiniai, žingsniniai, optiniai įrenginiai, dalinio posūkio ir salės efekto varikliai ir kt., Naudojami naudojant kai kurias technikas, kad būtų galima juos pritaikyti pramonėje ir padaryti juos draugiškus
- DC varikliai naudojami taikant akumuliatorius, lėtesnį greitį, mobilumo programas.
- Visur, kur mums reikalinga į sukimą orientuota programa, galime naudoti „Stepper“ variklius, pavyzdžiui, vienpolius ir bipolinius.
- Galvos ir rankos judesiams galime naudoti dalinio posūkio variklius.
- Jei norime naudoti magnetinius laukus, galime naudoti „Hall Effect“ ir optinių diskų variklius ir pan.
Naudodami išmaniuosius variklius naudojančią robotiką galime sutaupyti pinigų, laiko, vietos, pavojingų judesių ir kt.
Ajay Sahare
Rinkodaros vadovas

Pramoniniai robotai naudojami pramoninės gamybos aplinkoje. Tai rankos, specialiai sukurtos tokioms reikmėms kaip suvirinimas, medžiagų tvarkymas, dažymas ir kt.
Ne kiekvienas mechatroninis prietaisas, naudojamas pramoninėje aplinkoje, gali būti laikomas robotu. Kaip apibrėžė ISO (Tarptautinė standartų organizacija), automatiškai valdomas, perprogramuojamas, daugiafunkcinis manipuliatorius, programuojamas trimis ar daugiau ašių, laikomas pramoniniu robotu.
Pramoninėje robotikoje naudojami varikliai yra
- Kintamosios srovės (AC) varikliai
- Nuolatinės srovės (DC) varikliai
- „Servo Motors“
- „Stepper Motors“.
1. Kintamosios srovės varikliai gali būti toliau skirstomi į asinchroninius ir sinchroninius tipus. Pavyzdžiui, asinchroninis kintamosios srovės variklis yra asinchroninio tipo įrenginys, kurį iš esmės sudaro vieliniu būdu suvyniotas statorius ir rotorius. Maitinimas prijungtas prie laido, o per jį tekanti kintamosios srovės įtempta viela sukelia elektromagnetinį (EM) lauką, kurio pakankamai stiprus laukas suteikia jėgą rotoriaus judėjimui. Sinchroniniai varikliai yra pastovaus greičio varikliai, kurie veikia sinchroniškai su kintamosios srovės linijos dažniu ir dažniausiai naudojami ten, kur reikalingas tikslus pastovus greitis.
2. Daugelyje pramonės sričių, įskaitant robotiką, nuolatinės srovės varikliai naudojami dažnai, nes lengva valdyti greitį ir kryptį. Jie gali turėti begalinį greičio diapazoną, nuo viso greičio iki nulio, turėdami platų apkrovų diapazoną.
Kadangi nuolatinės srovės varikliams būdingas didelis sukimo momento ir inercijos santykis, jie gali greitai reaguoti į valdymo signalų pokyčius. Nuolatinės srovės variklį galima sklandžiai valdyti iki nulio judėjimo ir akimirksniu pagreitinti priešinga kryptimi, nereikalaujant sudėtingos maitinimo perjungimo grandinės. Nuolatinio magneto bešepetėliai nuolatinės srovės varikliai paprastai yra brangesni nei šepetėlių tipai, nors jie gali suteikti energijos vartojimo ir patikimumo pranašumų.
Be komutatoriaus, be šepetėlių varikliai gali veikti efektyviau ir didesniu greičiu nei įprasti nuolatinės srovės varikliai. Dauguma bešepetėlių nuolatinės srovės variklių veikia trapecijos formos kintamosios srovės bangos forma, tačiau kai kurie varikliai veikia sinusinėmis bangomis. Sinusinės bangos varomi be šepetėlių varikliai gali pasiekti sklandų darbą, esant mažesniam greičiui, esant mažam sukimo momento bangavimui, todėl jie idealiai tinka šlifavimui, dengimui ir kitoms reikmėms, pavyzdžiui, paviršiaus apdailai.
Jei norite, kad būtų naudojami nuolatinės srovės varikliai, galite naudoti impulsų pločio moduliaciją (PWM), jei norite, kad jūsų variklis suktųsi lėčiau, neprarasdamas galios. Tai iš esmės reiškia labai greitai įjungti ir išjungti variklį. Tokiu būdu variklis sukasi mažesniu greičiu, tarsi būtų naudojama mažesnė įtampa, nesirūpinant galia.
Iš esmės, šepečiu nuolatinės srovės variklio sukurtas sukimo momentas yra per mažas, o greitis yra per didelis, kad būtų naudingas. Taigi, norint sumažinti greitį ir padidinti sukimo momentą, paprastai naudojamos pavarų redukcijos.
3. Servo varikliai naudojami uždarojo ciklo sistemose su skaitmeniniu valdikliu. Valdiklis siunčia greičio komandas vairuotojo stiprintuvui, kuris savo ruožtu maitina servo variklį. Tam tikros rūšies grįžtamojo ryšio įrenginys, pvz., Raiškiklis ar koduotuvas, teikia informaciją apie servo variklio padėtį ir greitį. Rezoliucorius arba kodavimo įrenginys gali būti integruotas į variklį arba įrengtas nuotoliniu būdu. Dėl uždaro ciklo sistemos servovariklis gali veikti su tam tikru judesio profiliu, kuris yra užprogramuotas valdiklyje.
4. Žingsniniai varikliai gali veikti su grįžtamuoju ryšiu arba be jo, variklio sukimąsi suskaidžius į mažus kampinius žingsnius. Jis valdomas impulsiniais komandos signalais ir gali tiksliai sustoti nurodytame taške, nereikalaujant stabdžių ar sankabos mazgų. Pašalinus maitinimą, nuolatinio magneto žingsninis variklis paprastai lieka paskutinėje padėtyje. Keli žingsniniai varikliai gali būti palaikomi sinchronizuoti juos varant iš bendro šaltinio.
Dev desai
Rinkodaros vadovas 
Jei planuojate užsiimti robotika, turėsite susipažinti su daugeliu galimų variklių tipų. Visas robotikos judėjimas vienaip ar kitaip yra varomas, todėl svarbu žinoti, kokia yra jūsų galimybė.
Nuolatinės srovės varikliai
Be to, kad nuolatinės srovės variklio judėjimo kryptį lemia maitinimas akumuliatoriumi, lemia įvesties energijos poliškumas. Tai yra būtina robotų funkcijų būtinybė. Laimei, šio tipo varikliai yra įvairių dydžių, įtampos reikalavimų ir yra prieinami visur.
Skirtingi variklių tipai yra tokie, kaip nurodyta toliau
- Judrumo pagrindo variklis
- Didelio greičio pomėgių variklis
- Diržo variklis
- Lizdas automobilio variklis
- Pulsas valdomas
- Rankos pritaikytas variklis
- Dvipolis laiptelis su rodykle
Bio variklis
Biometalas yra nuostabi medžiaga, gyvuojanti keletą metų ir ją galima pritaikyti robotikos srityje. Iliustracijoje matome, kad bio-metalinės vielos gabalas sumažės penkiais procentais jos ilgio, kai per ją bus įjungta vos keli voltai. Po daugelio metų bandymų biologinė viela pasirodė esanti stipri, patikima ir tampa vis naudingesnė, kai atsiranda naujų produktų. Dėl šiek tiek lėtesnio reagavimo laiko jis idealiai tinka robotų rankoms ir rankoms, kur trūkčiojimas būtų problemiškas. Ilgas vielos gabalas gali sukelti reikšmingą judesį, kai jis ištemptas per visą roboto ranką. Šiuo metu komercinėje rinkoje yra robotų rankų komplektų, kuriuose naudojamas bio metalas.
Estafetės
Robotikos relė beveik visada naudojama varikliams skirtai galiai atskirti nuo maitinimo šaltinio kompiuterio funkcijoms atlikti. Dėl mažos varžos varikliai kelia didelius dabartinius energijos tiekimo reikalavimus ir sukuria daugybę nesklandumų, kurių kompiuteriai negali toleruoti. Todėl tikslinga naudoti atskirą didelės srovės šaltinį tik varikliams.
Solenoidai
Solenoidus geriausia naudoti kaip manipuliatorių valdymo įtaisus arba perjungti operatorius. Jų judėjimas yra greitas ir stiprus, todėl spyruoklės beveik visada naudojamos spyruoklei, kad sušvelnintų veiksmą. Kaip matote iliustracijoje, griebtuvui uždaryti naudojami valdymo laidai. Šie valdymo laidai taip pat gali veikti kaip grįžtamosios spyruoklės. Tokių griebtuvų daugiau galima rasti gamybos linijos darbuose, kur užduotis yra labai išmatuota ir apima siaurus parametrus.
Antrinės funkcijos
Dauguma motorinių funkcijų apima judrumą, ranką, galvą ar kokį kitą matomą išorinį judesį, tačiau kai kurie variklio judesiai nėra tokie matomi. Dideli pramoniniai robotai naudoja hidraulines sistemas, kurios naudoja siurblio variklius, kad sukurtų darbinį hidraulinio skysčio slėgį. Kita svarbi antrinė variklių funkcija yra valdomas reguliavimas. Norint pagerinti tikslumą, potenciometrai, kurie yra susieti su varikliais, paprastai yra daugelio posūkių įtaisai.
Išvada
Robotai gali būti labai sudėtingi įrenginiai, reikalaujantys įvairiausių variklinių judesių. Šis straipsnis skirtas apžvelgti įvairius įrenginius, su kuriais galite susidurti kaip robotų kūrėjas. Geriausia būtų pradėti nuo robotų įrangos tiekėjų ir turimų atsargų tyrimų. Šiuo metu yra daugybė produktų, o internetas leidžia lengvai jį rasti, sužinoti ir naudoti. Kad ir kokie būtų jūsų poreikiai, jums turėtų pasitarnauti šiek tiek sumanumo ir ryžto, kurį, atrodo, turi visi robotų gamintojai.
Samadanas Wandre'as
Rinkodaros vadovas
„Robotikoje naudojami varikliai“
- Judrumo pagrindo variklis

- Didelio greičio pomėgių variklis
- Diržo variklis
- Lizdas automobilio variklis
- Pulsas valdomas
- Rankos pritaikytas variklis
- Dvipolis laiptelis su rodykle

Didesni varikliai geriausiai tinka judėjimo bazėms, kurios leidžia robotams manevruoti reljefą. Kai kurie iš šių variklių yra su pavarų dėžėmis, kad užtikrintų lėtesnį greitį ir sukimo momentą, reikalingą mobilumui. Sumažinus įtampą iki variklio, jis taip pat gali sulėtėti iki pageidaujamo greičio. Tik eksperimentais galima nustatyti, ar jūsų variklis veiks su mažesne įtampa. Jei taip, jūs sutaupėte daug problemų, jei ne, yra kitų būdų, kaip sulėtinti variklius. Kai kurie greitaeigiai varikliai gali būti naudojami, jei naudojamos sliekinės arba sraigtinės pavaros.
Sraigtinės pavaros pavyzdį galima pamatyti robotų rankos iliustracijoje. Kai variklis sukasi pagal laikrodžio rodyklę, varžto mazgas pritraukiamas prie variklio ir rankena susitraukia, o kai ji pasisuka prieš laikrodžio rodyklę, svirtis tęsiasi. Nors variklio velenas greitai sukasi, rankos veikimas yra žymiai lėtesnis dėl varžto sumažinimo. Šioje variklio grandinės iliustracijoje matome nuolatinės srovės variklį, valdomą galios tranzistoriaus. Relės jungiklis (dvigubas ašies dvigubas metimas) nustato kryptį. Tranzistorius Q1 turėtų būti galios tranzistorius, skirtas didelei variklio apkrovai.
Impulsiniai varikliai
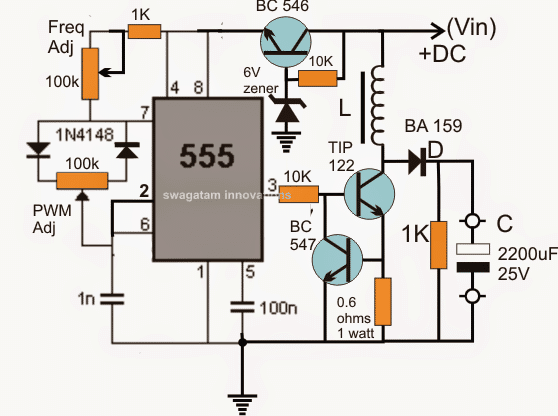
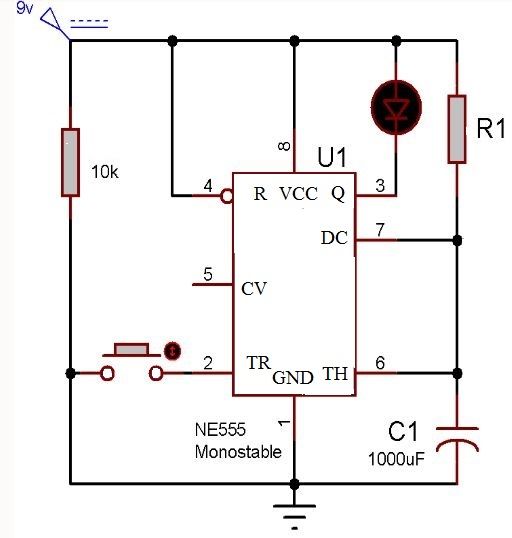
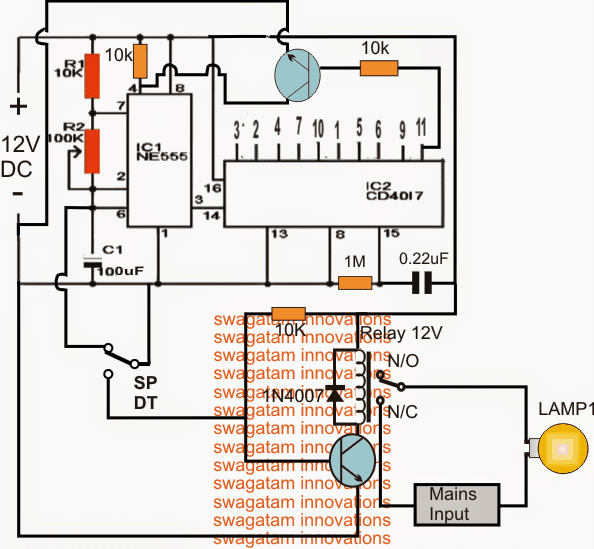
Kai kurie varikliai sukelia greičio sumažėjimą veikdami iš impulsinio nuolatinės srovės signalo. Šis signalas paprastai yra apie šimtą Hz. Variklio greitį galima keisti keičiant pulso plotį, o ne keičiant pulso dažnį. Tokių variklių, kaip šie, galima rasti elektronikos perteklių parduotuvėse ir juos lengva atpažinti pagal prie jo prijungtą impulsų generatorių. Bet kurį nuolatinės srovės variklį gali valdyti impulsinis šaltinis, tačiau yra tokios grandinės schema.
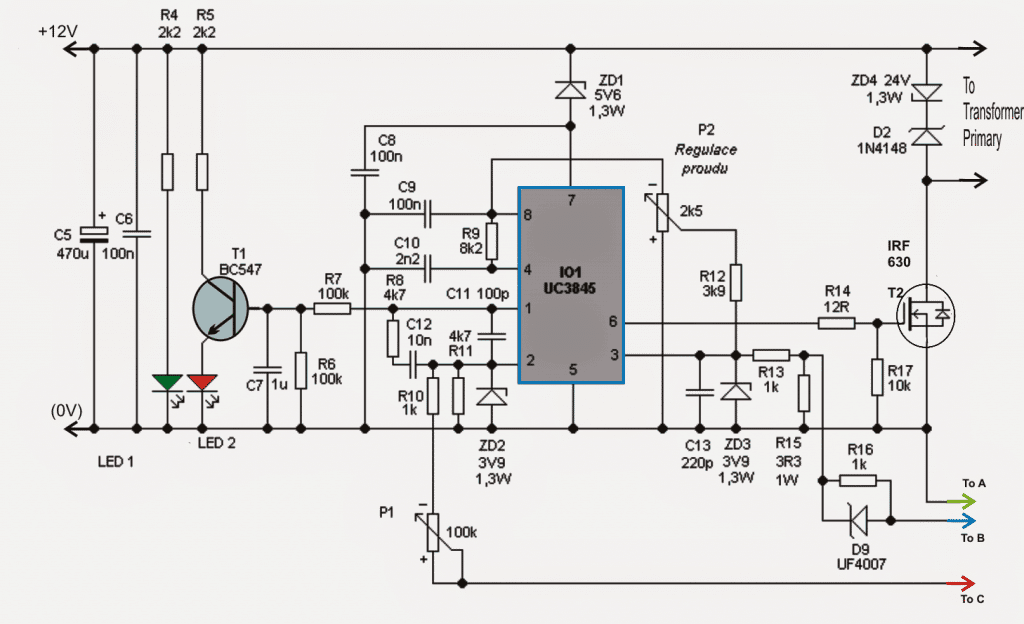
Kaip matote, pavaros osciliatoriumi buvo pasirinktas 555 laikmatis, kurio dažnis yra maždaug 100 Hz. Rezistorius R1 ir kondensatorius C stabilizuoja ir izoliuoja impulsų generatorių nuo variklio sukurtų smaigalių. Kadangi šis prietaisas gali semtis nuo 6 iki 12 voltų maitinimo šaltinio, galbūt norėsite pakeisti kondensatorių C4 ir C6 vertę, kad gautumėte geresnių rezultatų, priklausomai nuo to, kokią įtampą naudojate. Impulso išėjimas imamas iš IC1 trečiojo kaiščio ir tiekiamas į antrąjį IC2 kaištį, taip pat 555 laikmatį.
Antrasis laikmatis keičia impulso plotį, reguliuodamas įtampą, kuri tiekiama į kondensatorių C6 per potenciometrą R5 ir rezistorių R6. Impulso trukmė lemia variklio greitį, o impulso plotį galima reguliuoti nuo 10% iki 100%.
Transistorius Q1 priima impulso pločio moduliuojamą signalą per rezistorių R7. Kadangi Q1 yra silpnos srovės įtaisas, jis perduoda signalą Q2 - galios tranzistoriui, kuris gali patenkinti dabartinius variklio poreikius. Šie tranzistoriai nėra kritiški ir veiks beveik bet kokio tipo mažos srovės galios tranzistoriai. Relė nustatys, kokia kryptimi pasuks variklis.
„Stepper Motors“
Sudėtingiausias iš visų variklių yra žingsninis variklis. Kaip ir iš pavadinimo, variklis sukasi laipsniais ir yra valdomas impulsais. Tikslus posūkio posūkio laipsnis gali skirtis priklausomai nuo gamintojo ar modelio, tačiau 20 laipsnių yra populiarus ir sukuria 18 pakopų vienam posūkiui. Yra du pagrindiniai žingsninių variklių tipai: bipoliniai ir vienpoliai. Kaip matote žingsninio variklio schemoje, bipolinis yra tiesiog dviem ritėmis valdomas variklis.
Vienpolis tipas yra dvi ritės su centriniais čiaupais. Jei centrinių čiaupų nepaisoma, vienpolis variklis gali veikti kaip dvipolis. Dvi žingsninio variklio ritės tiekiamos pakaitiniais impulsais, pakaitomis polinės nuo ritės iki ritės. Darbo schemoje pateikiamas šio proceso žemėlapis, kuris grafiškai atspindi variklio veikimą. Skirtingai nuo įprastų nuolatinės srovės variklių, sukimo momentas mažėja bėgant. Taip pat reikalingas specialus pavaros bloko tipas, kad būtų galima judėti žingsniniu varikliu ir jis turėtų būti tiekiamas kartu su varikliu. Nerekomenduojama statyti valdymo bloko, nebent varikliui būtų pateiktas geras specifikacijų lapas su komponentų rekomendacijomis ir visa schema.
Varikliui gali prireikti buferių, kad jis būtų izoliuotas nuo pavaros sistemos, arba gali reikėti atskiro maitinimo šaltinio. Nepriklausomai nuo poreikių, jie gali labai skirtis. Hobių parduotuvės yra patikimiausi žingsninių variklių tiekėjai, ir nors perteklinėse elektroninėse parduotuvėse kartais jų gali būti, jose gali nebūti reikiamos informacijos
Daliniai posūkio varikliai
Kai kurioms robotų funkcijoms reikia tik dalinio posūkio, pavyzdžiui, galvos ar rankos judesių. Lengviausias būdas tai pasiekti yra padėties stabdikliai ir slydimo pavaros. Šio tipo variklių mechaninių detalių iliustracija pateikta aukščiau. Mikrojungikliai gali būti naudojami kaip sustabdymo jutikliai, kad išjungtumėte maitinimą ir nustatytumėte kito veiksmo kryptį.
Apatinis ratas sujungtas su varikliu, o viršutinis ratas nuo apatinio rato yra atskirtas apskritu veltinio gabalu. Kai apatinis ratas pasuka viršutinį ratą, jis sukasi tol, kol sustabdymo kaištis liečiasi su mikrojungikliu. Kai kuriuose projektuose nėra nuostatų dėl variklio sustabdymo, todėl paprasti varžtai su tarpikliais veiks kaip variklio stabdikliai.
Bio-variklis
Biometalas yra nuostabi medžiaga, gyvuojanti keletą metų ir ją galima pritaikyti robotikos srityje. Iliustracijoje matome, kad bio-metalinės vielos gabalas sumažės penkiais procentais jos ilgio, kai per ją bus įjungta vos keli voltai. Po daugelio metų bandymų biologinė viela pasirodė esanti stipri, patikima ir tampa vis naudingesnė, kai atsiranda naujų produktų. Dėl šiek tiek lėtesnio reagavimo laiko jis idealiai tinka robotų rankoms ir rankoms, kur trūkčiojimas būtų problemiškas. Ilgas vielos gabalas gali sukelti reikšmingą judesį, kai jis ištemptas per visą roboto ranką. Šiuo metu komercinėje rinkoje yra robotų rankų komplektų, kuriuose naudojamas bio metalas.
Bhaskaras Singhas
Rinkodaros vadovas
 Pramoniniai robotai yra prietaisai, kurie tam tikru mastu dubliuoja žmogaus judėjimą kartu su pavojaus mažinimu, suteikdami daugiau jėgos, tikslumo ir tęstinumo. Jiems reikia įvairių variklinių judesių, atsižvelgiant į jų darbo režimus, valdymą, naudojamus įrankius ir atliktiną darbą. Pramoninis robotinis variklis turėtų turėti galimybę atlikti daugybę įvairių užduočių nei įprasti varikliai, kad galėtų specializuotis tam tikroje užduotyje.
Pramoniniai robotai yra prietaisai, kurie tam tikru mastu dubliuoja žmogaus judėjimą kartu su pavojaus mažinimu, suteikdami daugiau jėgos, tikslumo ir tęstinumo. Jiems reikia įvairių variklinių judesių, atsižvelgiant į jų darbo režimus, valdymą, naudojamus įrankius ir atliktiną darbą. Pramoninis robotinis variklis turėtų turėti galimybę atlikti daugybę įvairių užduočių nei įprasti varikliai, kad galėtų specializuotis tam tikroje užduotyje.
Elektriniai varikliai dažniausiai naudojami pramoninėje robotikoje dėl labai efektyvaus energijos tiekimo ir gana paprasto projektavimo, dėl kurio jie yra populiaresnis pasirinkimas vertinant kainos ir kokybės santykį visais aspektais - montuojant, prižiūrint ir prižiūrint.
Priklausomai nuo reikalingo darbo, skirtingiems tikslams naudojami skirtingi varikliai. Pavyzdžiui, nuolatinės srovės varikliai naudojami judėjimui pagal laikrodžio rodyklę ir prieš laikrodžio rodyklę, pavyzdžiai yra kranai ir keltuvai, impulsiniai varikliai naudojami impulsiniams judėjimams teikti naudojant nuolatinės srovės impulsų plotį, daliniai posūkio varikliai naudojami kaip galvos ir rankos judesiai ir sudėtingiausias - žingsniniai varikliai naudojami laipsniškiems posūkiams laipsniškai didinti.
Be to, priklausomai nuo darbo tipo, skirtingiems tikslams naudojami skirtingo reitingo ir dydžio varikliai. Priklausomai nuo darbo ir roboto konstrukcijos, yra keli variklių tipai, kurių kiekvienas skirtingose vietose yra skirtingas.
Mohanas Krišna. L
Pardavimų ir palaikymo vadovas
Robotai naudojami atlikti darbą, kurį galėtų atlikti žmonės, ir yra daugybė priežasčių, kodėl robotai yra geresni už žmones. 
Yra du pagrindiniai robotų tipai:
Mobilus robotas: Tas judėjimas kojomis ar takeliais.
Stacionarus robotas: Tai turi fiksuotą pagrindą.
Stacionarūs robotai paprastai yra robotų ginklai, kuriuos galima naudoti norint pasiimti daiktus ar atlikti kitą darbą, kuris apima prieigą prie objekto.
Roboto ranką sudaro trys pagrindinės dalys: -
- Pečių sąnarys
- Riešo sąnarys
- Fiksuota bazė
Reikia roboto
- Gebėjimas dirbti greitai ir pavojinga aplinka.
- Gebėjimas pakartoti užduotis vėl ir vėl.
- Gebėjimas tiksliai dirbti.
- Gebėjimas atlikti įvairias užduotis.
- Efektyvumas.
Variklis yra įtaisas, kuris elektros energiją paverčia mechanine, t. Y. Elektromechaniniu įtaisu. Yra dviejų tipų varikliai, tokie kaip kintamosios srovės variklis ir nuolatinės srovės variklis.
Pramoninėje robotikoje naudojamas variklis yra servovariklis. Servovariklis yra paprastas elektrinis variklis, valdomas servo mechanizmo pagalba. Jei valdomą variklį valdo kintamosios srovės srovė, jis vadinamas kintamosios srovės servo varikliu, kitaip - DC servo varikliu. Dauguma servovariklių gali pasisukti apie 90–180 laipsnių. Net kai kurie sukasi per 360 laipsnių ar daugiau. Kai kurie iš servo variklio pritaikymų robotikoje yra
- Servo variklio pritaikymas robotams, t. Y. Paprastas išrinkimo ir padėjimo robotas, jis naudojamas objektui pasirinkti iš vienos padėties ir pastatyti jį skirtingoje padėtyje.
- Naudojami transporterių servovarikliai
- pramoniniame vienetų gamyboje ir surinkime, kad objektas būtų perduotas iš vienos surinkimo stoties į kitą. Pavyzdžiui: - butelio užpildymo procesas.
- Servo variklis robotizuotoje transporto priemonėje - servo variklis, naudojamas ratuose. Kadangi naudojamas nuolatinio sukimosi servovariklis.
Dinesh.P
Rinkodaros vadovas
 Pristatomi robotai, siekiant sumažinti sunkų žmogaus darbą ir padėti žmonėms sukurti sėkmę būsimiems įvykiams. Robotų terminas reiškia mašiną, imituojančią įvairias žmogaus savybes. Robotika apima mechanikos, elektronikos, elektros ir informatikos inžinerijos žinias. Robotuose naudojami varikliai yra DC varikliai, „Stepper“ ir „Servo“ varikliai
Pristatomi robotai, siekiant sumažinti sunkų žmogaus darbą ir padėti žmonėms sukurti sėkmę būsimiems įvykiams. Robotų terminas reiškia mašiną, imituojančią įvairias žmogaus savybes. Robotika apima mechanikos, elektronikos, elektros ir informatikos inžinerijos žinias. Robotuose naudojami varikliai yra DC varikliai, „Stepper“ ir „Servo“ varikliai
Kur,
- Nuolatiniai rotoriai naudojami nuolatinės srovės varikliams
- Žingsniniai varikliai naudojami sukant keliais laipsniais
- „Servo Motors“ naudojami pozicionavimui, jis gali būti naudojamas automobiliuose ir lėktuvuose
Ganesh .J
Rinkodaros vadovas 
Robotai naudojami atlikti darbą, kurį gali atlikti žmonės, taip pat sumažina žmogaus pastangas ir laiką bei pagerina kokybę. Pramoninėje robotikoje naudojami varikliai yra
- Kintamosios srovės (AC) varikliai
- Nuolatinės srovės (DC) varikliai
- „Servo Motors“
- „Stepper Motors“.