
Įvadas į įterptąsias sistemas
Sistema, kurioje programinės įrangos paskirtis yra integruota į aparatinės įrangos dizainą, yra žinoma kaip įterptoji sistema. Ši sistema gali būti nepriklausoma arba didesnė sistema. Paprastai programinė įranga įterpiama atminties moduliai kaip ROM, ir jai nereikia jokios antrinės atminties, kaip kompiuteryje. Telekomunikacijos, lustinės kortelės, raketos, kompiuterių tinklai, skaitmeninė buitinė elektronika palydovai yra keletas įterptųjų sistemų programų.

Įterptųjų sistemų programos
Įterptųjų sistemų programos apima robotiką, skaitmeninius fotoaparatus, daugiafunkcinius žaislus, maisto ruošimo ir skalbimo sistemas, biomedicinos sistemas, valdiklių valdiklius, mobiliuosius ir išmaniuosius telefonus, skaičiavimo sistemas, elektroninę išmaniojo svorio rodymo sistemą ir pramogų sistemas, tokias kaip vaizdo įrašai, žaidimai, muzikos sistema vaizdo žaidimai ir pan.
Įterptosios sistemos projektavimo procesas pirmiausia galima atlikti modeliuojant, kuris naudojamas grandinės testavimui, nes keičiant aparatūrą tampa labai sunku, jei grandinė sutrinka. Jei rezultatai bus suderinti su norimais rezultatais, procesas bus visam laikui suprojektuotas nuosekliais plokštelių procesais.
Įterptųjų sistemų pagrindai
Įterptosios sistemos yra skirtos atlikti konkrečias užduotis, tačiau negali būti naudojamos kaip bendrosios paskirties kompiuteriai skirtingoms užduotims atlikti. Įterptosios sistemos programinė įranga paprastai vadinama programine aparatine įranga, kurią galima laikyti diske arba vienoje mikroschemoje. Du pagrindiniai sistemų elementai yra šie:
- Įterptosios sistemos aparatinė įranga
- Įterptųjų sistemų programinė įranga

Įterptosios sistemos aparatinė ir programinė įranga
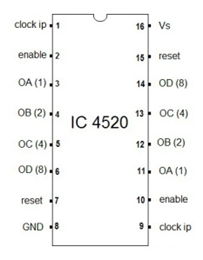
Įterptosios sistemos aparatinė įranga : Įterptoji sistema reikalauja aparatinės įrangos platformos, kad galėtų sąveikauti su įvairiais realiojo laiko įėjimais ir išėjimais arba kintamaisiais. Į aparatinę įrangą įeina valdiklis kaip mikrovaldiklis arba mikroprocesorius , atminties moduliai, įvesties / išvesties sąsajos, rodymo sistemos ir ryšio moduliai ir kt.
Įterptųjų sistemų programinė įranga : Ši programinė įranga leidžia programuoti norimu būdu, tokiu būdu valdant įvairias operacijas. Tai parašyta aukšto lygio formatu, sukompiliuojama į kodą ir po to perkeliama į aparatūros valdiklius.
Realaus laiko įterptosios sistemos yra kompiuterinės sistemos, atliekančios veiksmus, tokius kaip išorinio judėjimo stebėjimas, reagavimas ir valdymas. Išorinė aplinka yra prijungta prie kompiuterio sistemos per jutikliai , pavaros ir įvesties / išvesties sąsajos. Tikroji kompiuterinė sistema, įterpta į kompiuterinę sistemą, yra žinoma kaip įterptoji realiuoju laiku. Realaus laiko įterptoji sistema naudojama įvairiose srityse, tokiose kaip karinis, vyriausybinis sektorius ir medicina.
Robotiniai realaus laiko projektai įterptosiose sistemose
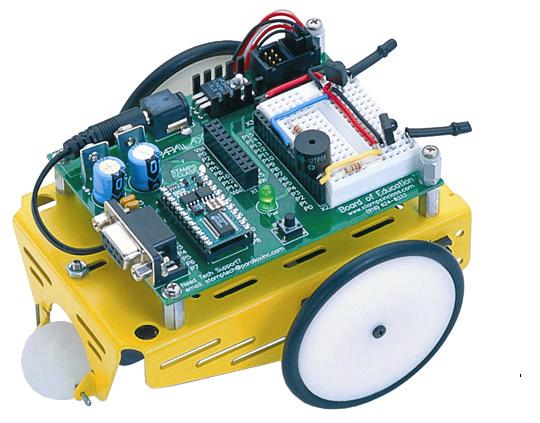
Įterptinės sistemos gali būti naudojamas daugelyje realaus laiko programų, tokių kaip automobiliai, robotika, pramonė ir kt. Toliau realaus laiko projektai yra susiję su robotikos technologijomis .
1. Balsu valdoma robotinė transporto priemonė su tolimojo kalbos atpažinimo funkcija
Šio projekto tikslas - balso komandomis valdyti robotizuotą transporto priemonę nuotoliniam valdymui. An 8051 mikrovaldiklis yra naudojamas su kalbos atpažinimo moduliu norimai operacijai atlikti. Tam naudojamas 8051 mikrovaldiklis, kalbos atpažinimo modulis, mygtukas, RF modulis, kodavimo įrenginys, dekoderis, variklio-vairuotojo IC, nuolatinės srovės varikliai, baterijos ir kiti įvairūs komponentai.

Balsu valdoma robotizuota transporto priemonė - siųstuvas
Transporto priemonės judesius, tokius kaip kairė, dešinė, aukštyn ir žemyn, galima atlikti naudojant mygtukus ar balso komandas kalbos atpažinimo moduliu, kuris yra sujungtas su mikrovaldikliu. Čia koduotojas naudojamas užkoduoti komandoms, duotoms mikrovaldikliui naudojant RF siųstuvas perduoti signalus 433 MHz dažniu.
Todėl, kai mikrovaldiklis priima signalus, atsirandančius paspaudus mygtukus, arba balso komandos signalus, atitinkančius judesį, jis per siųstuvo modulį siunčia valdymo signalus į imtuvo grandinę.

Balsu valdomas robotizuotas transporto priemonių imtuvas
Gavęs šiuos signalus, RF imtuvas perduoda tuos signalus į dekoderio grandinę, kurioje dvejetainiai duomenys paverčiami mikrovaldiklio lygio signalu. Todėl mikrovaldiklis atlieka norimą judėjimą iš siųstuvo grandinės. Lazerio modulis yra sąsaja su mikrovaldikliu roboto atliekamoms operacijoms aptikti net tamsiose vietose.
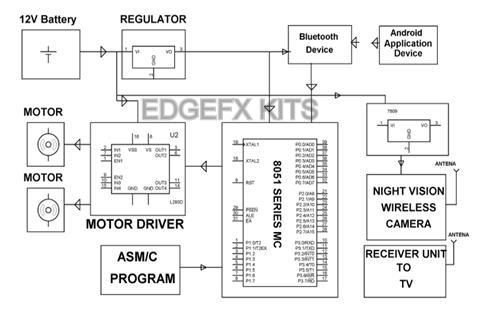
2. Jutikliniu ekranu valdoma nuotolinio valdymo robotinė transporto priemonė parduotuvės valdymui
Šis projektas apima robotizuotos transporto priemonės valdymą naudojant jutiklinį ekraną įrenginys nuotoliniam valdymui. Siųstuvo gale uždėtas jutiklinio ekrano skydelis ir a „pick-n“ vietos robotas yra dedamas imtuvo gale, kad galėtų atlikti užduotį atsakydamas į signalus. Šiame projekte naudojami techninės įrangos komponentai yra 8051 mikrovaldiklis, jutiklinio ekrano skydelis, antenos (siųstuvo-imtuvo pusė), kodavimo įrenginys, dekoderis, nuolatinės srovės varikliai, robotizuotas korpusas, akumuliatorius ir kt.

Jutiklinis ekranas pagrįstas robotizuotas automobilis-siųstuvas
Kaip aptarta aukščiau minėto projekto kalbos atpažinimo modulyje, šiame projekte jutiklinio ekrano modulis mikrovaldikliui siunčia transporto priemonės judėjimą atitinkančius valdymo signalus. Valdiklis vėliau siunčia tuos signalus į kodavimo įrenginį, o tada į siųstuvą, kuris galiausiai perduoda signalus į imtuvo grandinę.

Jutiklinis ekranas pagrįstas robotinis transporto priemonės imtuvas
Antena, pastatyta imtuvo gale, priima RF signalus iš perduodančios antenos, iššifruoja duomenis ir tada siunčia tuos duomenis į mikrovaldiklį. Ši sąranka turi keturis variklius, sujungtus su mikrovaldikliu: du varikliai rankos ir griebtuvo judėjimui, o kiti du - kūno judėjimui. Visus šiuos variklius varo variklio tvarkyklė IC, kuri nuolat gauna komandas iš mikrovaldiklio.
Tai yra du įterptųjų sistemų programas robotikos srityje. Realaus laiko įterptųjų sistemų pavyzdžiai galėjo geriau suprasti įdėtųjų sistemų sąvoką. Jei turite daugiau abejonių dėl šių projektų įgyvendinimo, galite susisiekti su mumis komentuodami žemiau.
Nuotraukų kreditai
- Įterptųjų sistemų programos oocities
- Įterptosios sistemos aparatinė ir programinė įranga dca-dizainas







{kind=link}