
Paprastai nuotolinio valdymo robotai naudoja RF grandines, kurių trūkumai yra ribotas darbo diapazonas, ribotas valdymas ir ribotas dažnių diapazonas. Norėdami pašalinti šiuos trūkumus, mobiliuoju telefonu valdomas „Land Rover“ naudojama robotinė transporto priemonė. Tai suteikia robotinio valdymo, be įsibrovimo valdiklių ir iki dvylikos valdymo sistemų ir kt. Pranašumus.
Nors galimybės ir išvaizda įterptoji robotika labai skiriasi, visi robotai, valdydami tam tikrą formą, dalijasi kilnojamos, mechaninės konstrukcijos savybėmis. Robotų valdymas apima tris skirtingus etapus - tai suvokimas, apdorojimas ir veiksmas. Paprastai jutikliai montuojami ant roboto. Suvokimą ir apdorojimą atlieka borto mikrovaldiklis, o veiksmas atliekamas naudojant variklius.
Mobilusis telefonas valdo „Land Rover“ robotizuotą transporto priemonę

Mobilusis telefonas valdo „Land Rover“ robotizuotą transporto priemonę, kurią pateikė Edgefxkits.com
Pagrindinis šio projekto tikslas yra valdyti robotą, pritvirtintą ant roboto, naudojant mobilųjį telefoną. Tai suteikia didelį darbinį diapazoną ir tvirtą valdymą ir kt.
Blokinė mobiliojo telefono valdomos robotinės „Land Rover“ transporto priemonės schema:

Blokuoti mobiliojo telefono valdomo „Land Rover“ schemą
Pagrindiniai elementai yra mikrovaldiklis, mobilusis telefonas, DTMF dekoderis ir nuolatinės srovės variklio-tvarkyklės grandinė. Mobilusis telefonas yra svarbiausia visos sistemos dalis, nes visa sistema veikia ir ją suaktyvina mobilusis telefonas. DTMF (dviejų tonų daugialypis dažnis) gauna iš mobiliojo telefono įvestą signalą ir jį iššifruoja, tada sukuria 4 bitų skaitmeninį išėjimą 8051 mikrovaldiklis . Kai DTMF dekoderis suteikia skaitmeninę išvestį, jis taip pat kiekvieną kartą generuoja pertraukimą.
Mikrovaldiklis yra visos sistemos širdis, nes jis atlieka visus valdymo veiksmus. Mikrovaldiklis priklauso nuo kodo, kurį sugeneruoja DTMF dekoderis, kad judėtų roveris į dešinę arba į kairę ir į priekį arba atgal, sukant abu nuolatinės srovės variklius. Nuolatinės srovės variklio tvarkyklė gauna aktyvinamuosius signalus iš mikrokontrolerio pagal žemą ar aukštą logiką, tada jis sustiprina ir pasuka du variklius į abi puses.
Roboto valdymas apima daugiausia keturias skirtingas fazes: suvokimą, veiksmų apdorojimą ir aptikimą. Suvokimo etape, jei prie roboto prijungtas mobilusis telefonas priima skambutį, tada paspaudus klavišą ant mobiliojo telefono, dekoduojamas sugeneruotas DTMF tonas. Tada dekoderio lustas gauna garso signalą iš mobiliojo telefono ir tada DTMF toną paverčia dvejetainiu kodu, kuris tada tiekiamas į mikrovaldiklį. Šiame projekte MT88710 IC naudojamas kaip DTMF dekoderis. Apdorojimo etape mikrovaldiklis apdoroja dvejetainį kodą, gautą iš DTMF dekoderio. Mikrovaldiklis iš anksto užprogramuotas „C“ atlikti šią konkrečią užduotį pagal įvesties bitus.
Veikimo etape variklių sukimasis priklauso nuo įvesties, kurią duoda mikrovaldiklis. Du nuolatinės srovės varikliai, kurių kiekvienas yra 30 aps / min, naudojami „Landrover“ automobiliams, kuriuos varo variklio-vairuotojo IC. Aptikimo stadijoje ir kliūčių aptikimo atveju infraraudonųjų spindulių siųstuvas ir imtuvas yra naudojami kartu su garsiniu signalu. Kai kliūtis ateina priešais robotą, IR siųstuvas perduoda objekto IR spindulius, tada objektas atspindi IR spindulius į IR imtuvą. Tada IR imtuvas priima IR spindulius, kad įjungtų garsinį signalą.
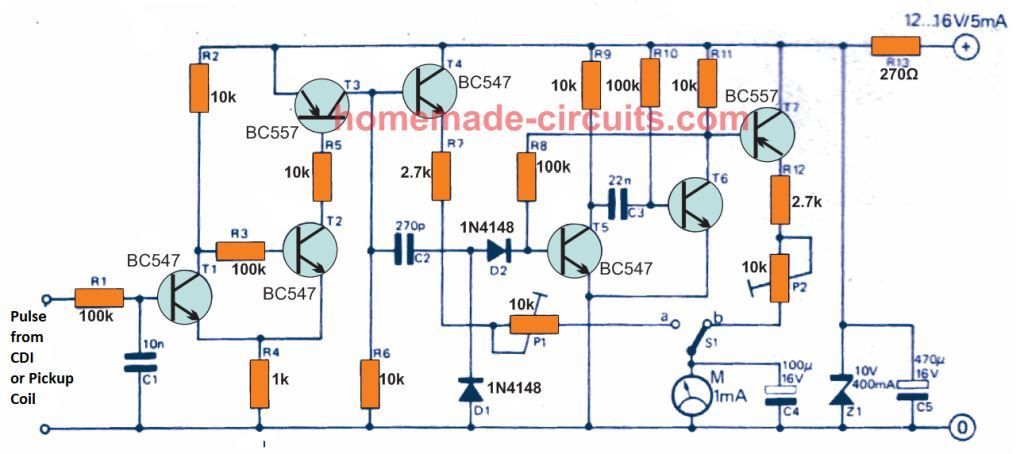
Mobilusis telefonas valdomos robotinės transporto priemonės grandinės schema:
Pagrindiniai šio mobiliuoju telefonu valdomo roboto „Landrover“ komponentai yra mikrovaldiklis, variklio tvarkyklė ir DTMF dekoderis. Šiame projekte naudojamas MT8870 serijos DTMF dekoderis, kuris naudoja skaitmeninius skaičiavimo metodus, kad nustatytų 16 DTMF tonų porų į 4 bitų kodo išvestį. Integruota skambėjimo tonų grandinė pašalina išankstinį filtravimą. Jei įvesties signalas yra pateiktas prie smeigtuko 2, pripažįstama, kad įvesties konfigūracija yra veiksminga. DTMF tono 4 bitų dekodavimo signalas per kaiščio 14 išvestį perduodamas į kaištį11. Šie kaiščiai yra prijungti prie mikrovaldiklio kaiščių Pao, Pa1, Pa2 ir Pa3. Mikrovaldiklio išvestis iš prievado kaiščių nuo PD0 iki PD3 ir PD7 tiekiama į įėjimus IN1, IN4 ir leidžia variklio-vairuotojo L293D IC kaiščiams EN1, EN2 varykite du nuolatinės srovės variklius .

„Land Rover“ mobiliuoju telefonu valdomos grandinės schema
Šioje grandinėje S1 jungiklis naudojamas rankiniam atstatymui. Mikrovaldiklio išėjimo nepakanka nuolatinės srovės varikliams valdyti, todėl variklio sukimui reikalingos srovės tvarkyklės. L293D variklio tvarkyklė sukurta tiekti iki 600 mA dvikryptes pavaros sroves esant įtampai nuo 4,5 V iki 36 V, todėl tai lengviau valdyti nuolatinės srovės variklius. L293D variklio vairuotoją sudaro keturi vairuotojai. Kaiščiai nuo IN1 iki IN4 ir OUT1 bei OUT4 yra vairuotojo 1 per tvarkyklę 4 įvesties ir išvesties kaiščiai. 1,2,3 ir 4 tvarkykles įgalina įjungimo kaiščiai1 (EN1) ir kaištis 9 (EN2). Kai įgalinimo įvestis EN1 (PIN1) yra aukšta, įjungiamos 1 ir 2 tvarkyklės. Panašiai įgalinimo įvestis EN2 (PIN9) įgalina tvarkykles 3.
Privalumai ir trūkumai:
Mobiliuoju telefonu valdomo roboto „Landrover“ privalumai yra belaidžio valdymo aprūpinimo ir stebėjimo sistema, 3G technologijomis paremta transporto priemonių navigacija ir neribotas veikimo diapazonas, pagrįstas mobiliojo telefono tinklu. Trūkumas yra toks: išlaidos už mobilųjį telefoną yra didelės mobiliosios baterijos išsikrauna : išsikrovimo problema, susijusi su baterijomis, nes akumuliatoriai praranda įkrovą dėl greito iškrovimo, nes apkrova yra labai pritaikoma: sistema nėra pritaikoma visiems mobiliesiems telefonams, tačiau tuos, su kuriomis yra prijungtos ausinės, galima naudoti tik.
Taigi šis „Cellphone“ valdomas roboto projektas yra labai naudingas karinėse programose valdyti karines transporto priemones naudojant mobilųjį telefoną. Ateityje mes galime nustatyti priešų padėtį organizuodami a belaidė kamera į robotą „land rover“. Šis projektas taip pat gali būti naudingas mokslininkams, nes studentai gali išmokti įvairių šiame projekte siūlomų terminų ir principų. Šis projektas padės studentams pridėti naujoviškų minčių ir idėjų plėtoti robotikos projektus .
Nuotraukų kreditai:
- Mobilusis telefonas valdo „Land Rover“ santoshbanisetty
- 'Land Rover' mobiliuoju telefonu valdomos grandinės schema inžinierių garažas







{kind=link}