
Apibrėžimas
Nešvarus nuolatinės srovės variklis susideda iš nuolatinio magneto formos rotoriaus ir statoriaus, kuris yra daugiafazis armatūros apvijas. Jis skiriasi nuo įprasto nuolatinės srovės variklio tuo, kad jame nėra šepečių, o komutacija atliekama naudojant elektrą, naudojant elektroninę pavarą statoriaus apvijoms tiekti.
Iš esmės BLDC variklis gali būti sukonstruotas dviem būdais - padedant rotorių už šerdies ir apvijas į šerdį, o kitą - apvijas už šerdies. Pagal ankstesnį išdėstymą rotoriaus magnetai veikia kaip izoliatorius ir sumažina šilumos išsiskyrimo iš variklio greitį ir veikia esant silpnai srovei. Paprastai jis naudojamas ventiliatoriuose. Pastaruoju atveju variklis išsklaido daugiau šilumos, todėl padidėja jo sukimo momentas. Jis naudojamas kietajame diske.

BLDC
4 polių 2 fazių variklio veikimas
Nešvarus nuolatinės srovės variklis varomas elektronine pavara, kuri rotoriui sukantis perjungia maitinimo įtampą tarp statoriaus apvijų. Rotoriaus padėtį stebi keitiklis (optinis arba magnetinis), kuris teikia informaciją elektroniniam valdikliui, ir, remiantis šia padėtimi, nustatoma statoriaus apvija, į kurią bus įjungta įtampa. Ši elektroninė pavara susideda iš tranzistorių (po 2 kiekvienai fazei), valdomų per mikroprocesorių.

BLDC-DC
Nuolatinių magnetų sukurtas magnetinis laukas sąveikauja su statoriaus apvijose esančios srovės sukeltu lauku ir sukuria mechaninį sukimo momentą. Elektroninė perjungimo grandinė arba pavara perjungia maitinimo srovę į statorių taip, kad palaikytų pastovų 0–90 laipsnių kampą tarp sąveikaujančių laukų. Salės jutikliai dažniausiai montuojami ant statoriaus arba ant rotoriaus. Kai rotorius praeina per salės jutiklį, remiantis Šiaurės ar Pietų ašigaliu, jis generuoja aukštą arba žemą signalą. Remiantis šių signalų deriniu, yra apibrėžta apvija, kurią reikia įjungti. Norint išlaikyti variklio veikimą, apvijų sukurtas magnetinis laukas turėtų pasikeisti padėtį, kai rotorius juda, kad pasivytų statoriaus lauką.

Grandinė
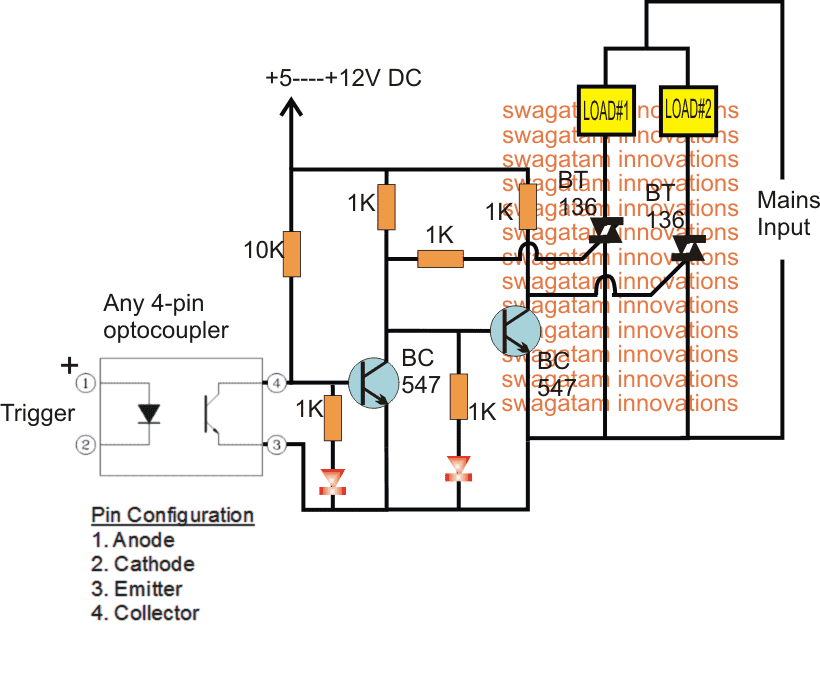
4 polių, 2 fazių bešepetiniame nuolatinės srovės variklyje naudojamas vieno salės jutiklis, įmontuotas ant statoriaus. Rotoriui sukantis, salės jutiklis nustato padėtį ir sukuria aukštą arba žemą signalą, priklausomai nuo magneto poliaus (šiaurės ar pietų). Salės jutiklis per rezistorių prijungtas prie tranzistorių. Kai jutiklio išėjime atsiranda aukštos įtampos signalas, tranzistorius, prijungtas prie ritės A, pradeda laidyti, užtikrindamas srovės tekėjimo kelią ir tokiu būdu įjungdamas ritę A. Kondensatorius pradeda krauti visą maitinimo įtampą. Kai salės jutiklis nustato rotoriaus poliškumo pasikeitimą, jo išėjime jis sukuria žemos įtampos signalą, o kadangi tranzistorius 1 negauna jokio maitinimo, jis yra išjungtas. Aplink kondensatorių sukurta įtampa yra Vcc, kuri yra maitinimo įtampa 2ndtranzistorius, o ritė B dabar maitinama, kai srovė praeina per jį.
BLDC varikliuose yra fiksuoti nuolatiniai magnetai, kurie sukasi, ir fiksuota armatūra, pašalindami srovės prijungimo prie judančios armatūros problemas. Ir galbūt daugiau rotoriaus polių nei statoriaus ar nenoro varikliai. Pastarasis gali būti be nuolatinių magnetų, tik stulpai, kurie sukami ant rotoriaus, tada nustatytu laiku statoriaus apvijos ištraukiami į išdėstymą. Elektroninis valdiklis pakeičia šepečio nuolatinės srovės variklio šepetį / komutatorių, kuris nuolat perjungia fazę į apvijas, kad variklis suktųsi. Valdiklis atlieka lyginamąjį laiko paskirstymą naudodamas kietojo kūno grandinę, o ne šepetėlių / komutatorių sistemą.

BLDC variklis
7 nuolatinės srovės variklių privalumai
- Geresnis greitis, palyginti su sukimo momento charakteristikomis
- Didelis dinaminis atsakas
- Didelis efektyvumas
- Ilgas eksploatavimo laikas, nes trūksta elektros ir trinties nuostolių
- Netriukšminga operacija
- Didesni greičio diapazonai
Programos:
Nuo pat pristatymo nuolatinio variklio be šepetėlio kaina sumažėjo dėl medžiagų ir dizaino pažangos. Dėl šio sumažėjusio kainų kartu su daugeliu centrinių taškų, esančių per teptuko nuolatinės srovės variklį, nuolatinės srovės variklis tampa be galo populiarus komponentas daugelyje išskirtinių programų. „BLDC“ variklį naudojančiose programose vis dar nėra apribojimų:
- Buitinė elektronika
- Transportas
- Šildymas ir vėdinimas
- Pramonės inžinerija
- Modelių inžinerija
Darbo principas
BLDC variklių darbo principai yra tokie patys kaip šepečiu nuolatinės srovės varikliu, ty vidinio veleno padėties grįžtamasis ryšys. Šlifuoto nuolatinės srovės variklio atveju grįžtamasis ryšys įgyvendinamas naudojant mechaninį komutatorių ir šepečius. BLDC variklyje tai pasiekiama naudojant kelis grįžtamojo ryšio jutiklius. BLDC varikliuose mes dažniausiai naudojame „Hall“ efekto jutiklį, kai rotoriaus magnetiniai poliai praeina šalia salės jutiklio, jie generuoja AUKŠTO arba ŽEMO lygio signalą, kurį galima naudoti veleno padėčiai nustatyti. Jei magnetinio lauko kryptis bus pakeista, sukurta įtampa taip pat pasikeis.
BLDC variklio valdymas
Valdymo bloką įgyvendina mikroelektronika, jis gali pasirinkti keletą aukštųjų technologijų. Tai gali būti įgyvendinta naudojant mikrovaldiklį, specialų mikrovaldiklį, laidinį mikroelektronikos įrenginį, PLC ar panašų kitą įrenginį.
Analoginis valdiklis vis dar naudoja, tačiau negali apdoroti grįžtamojo ryšio pranešimų ir atitinkamai valdyti. Naudojant tokio tipo valdymo grandines, galima įdiegti didelio našumo valdymo algoritmus, tokius kaip vektorinis valdymas, į lauką orientuotas valdymas, greitaeigis valdymas, kurie visi yra susiję su variklio elektromagnetine būsena. Be to, išorės kilpos valdymas įvairiems dinamikos reikalavimams, pvz., Stumdomo variklio valdymas, adaptyvus valdymas, nuspėjamasis valdymas ir kt., Taip pat yra įgyvendinamas įprastai.
Be visų šių, mes randame didelio našumo PIC (integruotas maitinimo grandynas), ASIC (konkrečios programos integruotos grandinės) ir kt. tai gali labai supaprastinti tiek valdymo, tiek maitinimo elektroninio bloko konstrukciją. Pavyzdžiui, šiandien mes turime pilną PWM (impulso pločio moduliacijos) reguliatorių viename IC, kuris kai kuriose sistemose gali pakeisti visą valdymo bloką. Sudėtinis tvarkyklės IC gali suteikti išsamų visų šešių maitinimo jungiklių valdymą trifaziu keitikliu. Yra daugybė panašių integrinių schemų, kurias kiekvieną dieną vis daugiau pridedama. Dienos pabaigoje sistemos surinkimas gali apimti tik dalį valdymo programinės įrangos, o visa aparatūra yra tinkamos formos ir formos.
PWM (impulso pločio moduliacija) banga gali būti naudojama variklio greičiui valdyti. Čia pateikiama vidutinė įtampa arba vidutinė srovė, tekanti per variklį, pasikeis priklausomai nuo impulsų įjungimo ir išjungimo laiko, valdančių variklio greitį, ty bangos veikimo ciklas kontroliuoja jo greitį. Keisdami darbo ciklą (įjungimo laiką), mes galime pakeisti greitį. Keičiant išvesties prievadus, jis efektyviai pakeis variklio kryptį.
Greičio kontrolė
BLDC variklio greičio valdymas yra būtinas, kad variklis veiktų norimu greičiu. Nešviečiamo nuolatinės srovės variklio greitį galima reguliuoti valdant įėjimo nuolatinės srovės įtampą. Kuo didesnė įtampa, tuo didesnis greitis. Kai variklis veikia įprastu režimu arba veikia žemiau vardinio greičio, per PWM modelį keičiama armatūros įėjimo įtampa. Kai variklis veikia virš nominalaus greičio, srautas susilpnėja, didinant išeinančią srovę.
Greičio valdymas gali būti uždaros arba atviros grandinės greičio valdymas.
Atviro ciklo greičio valdymas - tai reiškia tiesiog valdyti variklio gnybtuose esančią nuolatinės srovės įtampą, suskaidant nuolatinės srovės įtampą. Tačiau tai lemia tam tikrą srovės ribojimo formą.
Uždaro ciklo greičio valdymas - Tai apima įvesties maitinimo įtampos valdymą per variklio grįžtamąjį greitį. Taigi maitinimo įtampa valdoma priklausomai nuo klaidos signalo.
Uždarojo ciklo greičio valdymas susideda iš trijų pagrindinių komponentų.
- PWM grandinė reikalingiems PWM impulsams generuoti. Tai gali būti mikrovaldiklis arba laikmačio IC.
- Jutiklis, skirtas tikram variklio greičiui nustatyti. Tai gali būti salės efekto jutiklis, infraraudonųjų spindulių jutiklis arba optinis koderis.
- Variklio pavara, skirta valdyti variklio veikimą.
Ši maitinimo įtampos keitimo technika pagal klaidos signalą gali būti atliekama naudojant „pid“ valdymo techniką arba naudojant neryškią logiką.
Taikymas nuolatinės srovės variklio greičio valdymui

BLDC nuolatinės srovės variklio valdymas
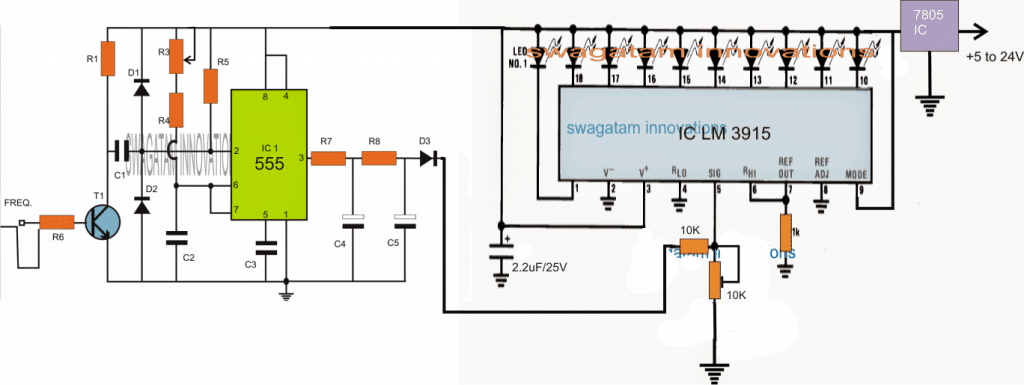
Variklio veikimas valdomas naudojant optroną ir MOSFET išdėstymą, kai įvestinė nuolatinė galia valdoma naudojant mikrovaldiklio PWM metodiką. Varikliui sukantis, ant jo veleno esanti infraraudonųjų spindulių lemputė apšviečiama balta šviesa dėl baltos dėmės ant jo veleno ir atspindi infraraudonąją šviesą. Fotodiodas gauna šią infraraudonąją spinduliuotę ir pasikeičia jos pasipriešinimas, todėl pasikeičia prijungto tranzistoriaus maitinimo įtampa, o mikrovaldikliui suteikiamas impulsas, kad būtų sukurtas apsisukimų skaičius per minutę. Šis greitis rodomas LCD.
Reikalingas greitis įvedamas į klaviatūrą, sujungtą su mikrovaldikliu. Skirtumas tarp užfiksuoto greičio ir norimo greičio yra klaidos signalas, o mikrovaldiklis generuoja PWM signalą pagal klaidos signalą, remdamasis neryškia logika, kad varikliui būtų suteikta nuolatinės srovės galia.
Taigi naudojant uždaro ciklo valdymą galima reguliuoti nuolatinės srovės variklio greitį be šepetėlių ir priversti jį sukti bet kokiu norimu greičiu.
Nuotraukų kreditas:




![12 V akumuliatorių įkroviklio grandinės [naudojant LM317, LM338, L200, tranzistorius]](https://electronics.jf-parede.pt/img/battery-chargers/11/12v-battery-charger-circuits-using-lm317.png)





{kind=link}